
最优化考试内容
期末考试题型
总分100,时间120min
简答题(名词解释),共5小题,每题6分,共30分
计算题,共5小题,每题10分,共50分
证明题,共2小题,每题10分,共20分
简答题
- 凸集、仿射集、凸锥
- 凸函数、凸函数的判定定理、与标量函数的复合、共轭函数
- 凸优化问题的标准形式、线性规划的标准形式、二次规划的标准形式、半定规划的标准形式
- Armijo准则、次梯度的定义
- 拉格朗日函数、拉格朗日对偶函数、拉格朗日对偶问题、弱对偶原理、Slater条件与强对偶、KKT条件
- 交替方向乘子法适用的类型、算法步骤
计算题
- 课件中的例子
- 平时作业
- 2.6(1)和(2),2.7,2.12(b)
- 2.13,4.1,4.3
- 6.2
- 5.7,5.10(求出KKT点),5.16
证明题
- 凸优化问题的可行域、解集都是凸集
- 弱对偶原理
- Slater条件满足时,KKT条件是凸问题全局最优解的一阶充要条件
- Slater条件说明强对偶性成立,且最优化可以达到
- 必要性,充要性
- 交替方向乘子法的收敛性准则
简答题
- 凸集、仿射集、凸锥
定义:
【凸集】: 如果连接集合
\mathcal{S}中的任意两点的线段都在\mathcal{S}内,则称\mathcal{S}为凸集,即x_{1},x_{2}\in S\Rightarrow\theta x_{1}+(1-\theta)x_{2}\in S,0\leqslant\forall\theta\leqslant1【仿射集】: 若过集合
\mathcal{S}中的任意两点的直线都在\mathcal{S}内,则称\mathcal{S}为仿射集,即x_{1},x_{2}\in S\Rightarrow\theta x_{1}+(1-\theta)x_{2}\in S,\forall\theta\in\mathbb{R}.锥: 对于集合
\mathcal{S}中的任意点x和任意\theta\geq 0都有\theta x\in \mathcal{S}.锥组合: 形如
x=\theta_{1}x_{1}+\cdot\cdot\cdot+\theta_{k}x_{k},\theta_{i}\geqslant0~(i=1,\cdot\cdot\cdot\cdot,k).的点称为
x_1,\cdots, x_k的锥组合.【凸锥】: 若集合
\mathcal{S}中任意点的锥组合都在\mathcal{S}中,则称\mathcal{S}为凸锥.
凸函数、凸函数的判定定理、与标量函数的复合、共轭函数
【凸函数定义】:
函数
f:\mathbb{R}^{n}\to\mathbb{R},若\mathrm{dom}f是凸集,且f(\theta x+(1-\theta)y)\le\theta f(x)+(1-\theta)f(y)对所有
x,y\in\mathsf{d o m}f~,0\le\theta\le1都成立,则称f是凸函数
【凸函数的判定定理】:
f:\mathbb{R}^{n}\to\mathbb{R}是凸函数,当且仅当对每个x\in\mathsf{d o m}f,v\in\mathbb{R}^{n},函数g:\mathbb{R}\to\mathbb{R}是关于t的凸函数g(t)=f(x+t\nu),\quad\mathrm{dom}~g=\{t|x+t\nu\in\mathrm{dom}f\}
【与标量函数的复合】:
给定函数g: \mathbb{R}^n\rightarrow \mathbb{R}和h:\mathbb{R}\rightarrow \mathbb{R},
f(x)=h(g(x))
若
g是凸函数,h是凸函数,\tilde{h}单调不减g是凹函数,h是凸函数,\tilde{h}单调不增
那么f是凸函数
对于n=1,g,h都可微分的情况,给出简证
f^{\prime\prime}(x)=h^{\prime\prime}(g(x))g^\prime(x)^2+h^\prime(g(x))g^{\prime\prime}(x).
要使得f^{\prime\prime}(x)\geq 0,那么需要每一项都大于等于,充分条件为:
h^{\prime\prime}(g(x))\geq 0,h^\prime(g(x))\geq 0,g^{\prime\prime}(x)\geq 0h^{\prime\prime}(g(x))\geq 0,h^\prime(g(x))\leq 0,g^{\prime\prime}(x)\leq 0
那么则分别对应两种情况
h为凸函数,h不递减,g为凸函数h为凸函数,h不递增,g为凹函数
g,h不可微分的时候,结论依然成立
推论:
- 如果
g是凸函数,则\exp g(x)是凸函数 - 如果
g是正值凹函数,则1/g(x)是凸函数(这里用第二条规则)
【共轭函数】
函数f的共轭函数定义为
f^{*}(y)=\operatorname*{sup}_{x\in\mathrm{dom}f}(y^\mathsf{T}x-f(x))
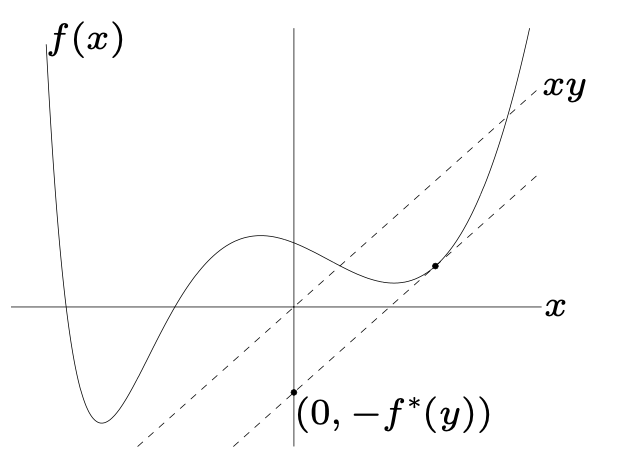
例子:f(x)=-\log x和f(x)=(1/2)x^{T}Q x,~Q\in\mathbb{S}_{++}^{n}
- 凸优化问题的标准形式、线性规划的标准形式、二次规划的标准形式、半定规划的标准形式
【凸优化问题的标准形式】
标准形式的凸优化问题
\begin{align} \min _{x \in D} \quad & f(x) \\ \text { s.t. } \quad & g_i(x) \leq 0, \quad i=1, \ldots, m \\ & A x=b \end{align}
- 目标函数
f、不等式约束条件g_i都是凸函数,必须是Ax=b - 定义域
D=\text{dom }f\cap (\cap_{i=1}^m\text{dom }g_i)通常省略 - 可行域为
X=D\cap\{x\mid g_i(x)\leq 0,i=1,2,\cdots,m,Ax=b\}
注意:凸优化问题的可行域为凸集
定义域:目标函数f和约束函数g_i中所有变量的取值范围。
可行域:满足所有约束条件的点的集合。
【线性规划的标准形式】
标准形式的线性规划问题
\begin{align}{} \operatorname*{min}_{x \in \mathbb{R}^n} \quad & c^\mathsf{T}x \\ \text { s.t. } \quad &Ax=b,\\ & x\geq 0. \end{align}
【二次规划的标准形式】
二次规划的标准形式
\begin{align}{} \operatorname*{min}_{x} \quad & \frac{1}{2}x^\mathsf{T}Px+q^\mathsf{T}x \\ \text { s.t. } \quad & x\geq 0,\\\quad &Ax=b. \end{align}
P\in \mathcal{S}^n_+(半正定)
【半定规划的标准形式】
半定规划的标准形式
\begin{align}{} \operatorname*{min}_{x} \quad & \langle C, X\rangle, \\ \text { s.t. } \quad & \langle A_1,X\rangle=b_1,\\ &\cdots\\ \quad &\langle A_m,X\rangle=b_m,\\ &X\succeq0. \end{align}
Armijo准则、次梯度的定义
【Armijo准则】
设
d^k是点x^k处的下降方向,若f(x^{k}+\alpha d^{k})\le f(x^{k})+c_{1}\alpha\nabla f(x^{k})^{\mathrm{T}}d^{k},则称步长
\alpha满足\mathbf{Armijo}准则,其中c_1\in (0,1)是一个常数.
\phi(\alpha)=f(x^{k}+\alpha d^{k})可知\phi(0)=f(x^k),\phi^{\prime}(\alpha)=\nabla f(x^{k}+\alpha d^{k})^{T}d^{k},在\alpha=0处的一阶近似为\phi(\alpha){\approx}f(x^{k})+\alpha\nabla f(x^{k})^{T}d^{k}
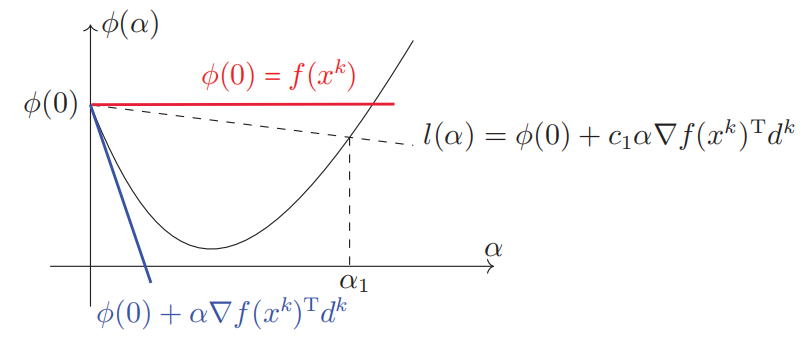
- 引入Armijo准则的目的是保证每一步迭代充分下降
- Armijo准则有直观的几何含义,它指的是点
(\alpha,\phi(\alpha))必须要在直线
l(\alpha)=\phi(0)+c_{1}\alpha\nabla f(x^{k})^{\mathrm{T}}d^{k}
的下方,上图中区间[0,\alpha_1]中的点均满足Armijo准则
- 参数
c_1通常选一个很小的正数,例如c_1=10^{-3}
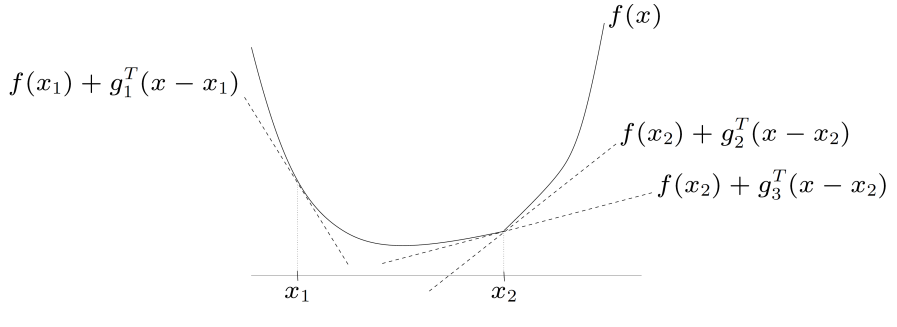
【次梯度的定义】
- 可微凸函数
f的一阶条件:f(y)\geq f(x)+\nabla f(x)^\mathsf{T}(y-x),即凸函数
f的线性近似总是在其下方.
- 设
f为凸函数,x\in \mathrm{dom} f. 若向量g\in\mathbb{R}^n满足f(y)\geq f(x)+g^\mathsf{T}(y-x),\quad \forall y\in \mathrm{dom} f,则称
g为函数f在点x处的一个次梯度.
f(x)+g^{\mathrm{T}}(y-x)是f(y)的一个全局下界- 凸函数
f(x)的次梯度总是存在(x是定义域的内点) - 如果
f是可微凸函数,那么\nabla f(x)是f在点x处的唯一次梯度 - 例:
g_2,g_3是点x_2的次梯度,g_1是点x_1处的次梯度
拉格朗日函数、拉格朗日对偶函数、拉格朗日对偶问题、弱对偶原理、Slater条件与强对偶、KKT条件
【拉格朗日函数】
一般的约束优化问题(没有要求是凸问题)
\begin{align*}
\min_{x\in\mathbb{R}}\quad &f_0(x)\\
\text{s.t.}\quad &f_i(x)\leq 0,i = 1,\cdots,m,\\
& h_j(x)=0,j=1,\cdots ,q.
\end{align*}
最优值是p^*,可行域是所有约束条件的交集\mathcal{X}
拉格朗日函数定义
L:\mathbb{R}^{n}\times\mathbb{R}_{+}^{m}\times\mathbb{R}^{q}~\to~\mathbb{R}L(x,\lambda,\nu)=f_{0}(x)+\sum_{i=1}^{m}\lambda_{i}f_{i}(x)+\sum_{j=1}^{q}\nu_{j}h_{j}(x)
\lambda_i为第i个不等式约束的乘子\nu_j为第j个等式约束的乘子
【拉格朗日对偶函数】
拉格朗日对偶函数
g:\mathbb{R}_{+}^{m}\times\mathbb{R}^{q}~\to~[-\infty,+\infty)\begin{align*} g(\lambda,v)&=\inf_{x\in\mathbb{R}^n} L(x,\lambda,v)\\ &=\inf_{x\in\mathbb{R}^n} (f_{0}(x)+\sum_{i=1}^{m}\lambda_{i}f_{i}(x)+\sum_{j=1}^{q}\nu_{j}h_{j}(x)) \end{align*}
PS:inf是下界的意思
对偶函数g(\lambda, \nu)是L(x,\lambda,\nu)对任意x的下界
【弱对偶原理】
若
\lambda \geq 0则g(\lambda, \nu)\leq p^*.
弱对偶原理描述了原问题和对偶问题间关系。如果\lambda\geq 0那么g(\lambda,\nu)最优值d^*永远小于等于最优值p^*
原因是因为对偶函数对于x没有限制,而拉格朗日函数对x有约束。
那么既然可行域都不一样,研究还有什么意义吗?其实对偶函数的解是拉格朗日函数解的下界,可以通过研究对偶值d^*来判断原始问题解的质量。在KKT条件下(强对偶条件),d^*=p^*。
【拉格朗日对偶问题】
拉格朗日对偶问题:
\operatorname*{max}_{\lambda\ge0,\nu}~g(\lambda,\nu)=\operatorname*{max}_{\lambda\ge0,\nu}\operatorname*{inf}_{x\in\mathbb{R}^{n}}~L(x,\lambda,\nu)
- 称
\lambda和\nu为对偶变量,对于最优值设为d^* d^*为p^*的最优下界,称p^*-d^*为对偶间隙- 无论原问题是否为凸,拉格朗日对偶问题总是凸优化问题
\mathsf{d o m}~g=\{(\lambda,\nu)\mid\lambda\ge0,g(\lambda,\nu)>-\infty\},其中元素称为对偶可行性解
【Slater条件与强对偶】
Slater约束品性定义:
对凸优化问题
\operatorname*{min}_{x\in\mathcal{D}}~~f_{0}(x),\quad\mathrm{s.t.}~~f_{i}(x)\color{blue}{\leqslant}\color{black}0,~i=1,2,\cdots,m,\quad A x=b,若存在
x\in\mathrm{relint}~\mathcal{D}满足f_{i}(x)\color{red}{<}\color{black}0,\quad i=1,2,\cdots,m,\quad A x=b,则称对此问题Slater约束品性满足. 该约束品性也称为Slater条件
\mathcal{D}是定义域,\mathrm{relint}表示相对内部,需要存在一个严格满足所有不等式约束的点,并且满足等式约束。- 核心要求:Slater条件要求在凸优化问题中,至少存在一个“严格可行点”(strictly feasible point),它位于不等式约束的内部。
- 如果不等式约束是仿射函数时候,可以放宽,前
k个不等式若仿射则可以等于
- 需要满足内部非空,而不是一个边界。例如
x+y\leq 1、x\geq 0和y\geq 0组成的边界-----------------------------------
举例(满足Slater条件):
\begin{aligned}{}{\underset{x}{\operatorname*{min}}}\quad &{{}x_{1}^{2}+x_{2}^{2},}\\ {\mathrm{s.t.}}\quad &{{}x_{1}+x_{2}\le1,}\\ &{x_{1}-x_{2}\le1.}\end{aligned}
不等式约束形成了一个多边形区域,我们可以找到一个点x=(0,0)满足不等式约束,所以Slater条件成立,满足强对偶性。(内部非空)
几何意义:如果所有可行点都“刚好”位于约束边界例如f_i(x)=0,那么拉格朗日函数下界可能过于松弛。
通过这种几何自由度,可以证明拉格朗日乘子\lambda, \nu存在,并且优化问题的原始最优值 p^*与对偶最优值 d^*是相等的。
【强对偶性】
定理:
若凸优化问题满足Slater条件,则强对偶性成立.
Slater条件:
- 凸问题.
- 可行域内存在
x使得非仿射不等式约束严格成立.
【KKT条件】
定理(凸优化问题的一阶充要条件)
考虑凸优化问题,且
f_0和f_i可微,\nabla f_0,\nabla f_i表示梯度. 若强对偶性成立,则x^*和\lambda^*,\nu^*分别是原始和对偶问题的全局最优解当且仅当KKT条件成立,KKT条件为稳定性条件
\quad 0=\nabla f_{0}\left(x^{*}\right)+\sum_{i=1}^{m} \lambda_{i}^{*} \nabla f_{i}\left(x^{*}\right)+A^{T} \nu^{*},原始可行性条件
f_{i}\left(x^{*}\right) \leq 0, i=1, \cdots, m ; \quad A x^{*}=b,对偶可行性条件
\quad \lambda_{i}^{*} \geq 0, i=1, \cdots, m,互补松驰条件
\quad \lambda_{i}^{*} f_{i}\left(x^{*}\right)=0, i=1, \cdots, m .
交替方向乘子法适用的类型、算法步骤
【交替方向乘子法适用的类型、算法步骤】
考虑如下凸问题:
\begin{align}
\min_{x_1,x_2}\quad &f_1(x_1)+f_2(x_2),\\
\text{s.t.}\quad &A_1x_1+A_2x_2=b
\end{align}\tag{1}\label{eq:1}
-
f_1,f_2是凸函数,但不要求是光滑的,x_1\in\mathbb{R}^n,x_2\in\mathbb{R}^m,A_1\in\mathbb{R}^{p\times n},A_2\in\mathbb{R}^{p\times n},b\in\mathbb{R}^p -
问题特点:目标函数可以分成彼此分离的两块,但是变量被线性约束结合在一起. 常见的一些无约束和带约束的优化问题可以表示成这一形式(举例一个)
-
可以分成两块无约束优化问题
\min_x\quad f_1(x)+f_2(x).
引入一个新的变量z并令x=z,将问题转化为
\begin{aligned}
\min_{x,z}\quad &f_1(x)+f_2(\color{blue}{z}\color{black})\\
s.t. \quad &\color{blue}x-z=0
\end{aligned}
【算法步骤】
- 首先写出问题(
\ref{eq:1})的增广拉格朗日函数
L_{\rho}(x_{1},x_{2},y){=}f_{1}(x_{1})+f_{2}(x_{2})+y^{\mathrm{T}}(A_{1}x_{1}+A_{2}x_{2}-b)+\frac{\rho}{2}\Vert A_1x_1+A_2x_2-b\Vert_2^2\tag{2}
其中y是拉格朗日乘子,\rho\gt0是二次罚项的系数.
有些时候可能导致解不满足约束条件。
那么这个时候就加上【罚项】,达到以对不满足约束条件的解进行惩罚的效果。
可以看出,只要不满足等式那么这个罚项就会变大,这可以让优化往满足约束条件的方向进行。
-------------------
- 常见的求解带约束问题的增广拉格朗日函数法为如下更新:
\begin{align}
(x_{1}^{k+1},x_{2}^{k+1})&=\operatorname*{argmin}_{x_{1},x_{2}}L_{\rho}(x_{1},x_{2},y^{k}),\tag{3}\\
y^{k+1}&=y^{k}+\rho(A_{1}x_{1}^{k+1}+A_{2}x_{2}^{k+1}-b).\tag{4}
\end{align}
-
交替方向乘子法的基本思路:第一步迭代(3)同时对
x_1和x_2进行优化有时候比较困难,而固定一个变量求解关于另一个变量的极小问题可能比较简单,因此我们可以考虑对x_1和x_2交替求极小 -
其迭代格式可以总结如下:
\begin{align}
x_{1}^{k+1}&=\underset{x_{1}}{\operatorname{argmin}} L_{\rho}\left(x_{1}, x_{2}^{k}, y^{k}\right), \tag{5}\\
x_{2}^{k+1}&=\underset{x_{2}}{\operatorname{argmin}} L_{\rho}\left(x_{1}^{k+1}, x_{2}, y^{k}\right), \tag{6}\\
y^{k+1}&=y^{k}+\rho\left(A_{1} x_{1}^{k+1}+A_{2} x_{2}^{k+1}-b\right) .\tag{7}
\end{align}
计算题(我的作业)
最优化理论与方法 作业 1
练习2.6:
-
计算下列矩阵变量函数的导数
(a)
f(X) = a^\mathsf{T}Xb,这里X \in \mathbb{R}^{m \times n}, a \in \mathbb{R}^m, b \in \mathbb{R}^n为给定的向量。
解答:
通过定义求解,对于任意方向V\in\mathbb{R}^{m\times n},可以求解:
\begin{align*}
\lim_{t\rightarrow 0}\dfrac{f(X+tV)-f(X)}{t}&=\lim_{t\rightarrow 0}\dfrac{a^\mathsf{T}(x+tV)b-a^\mathsf{T}xb}{t}\\
&=\lim_{t\rightarrow 0}\dfrac{ta^\mathsf{T}Vb}{t}\\
&=a^\mathsf{T}Vb\\
&=\mathrm{Tr}(a^\mathsf{T}Vb)\\
&=\mathrm{Tr}(ba^\mathsf{T}V)\\
&=\langle (ba^\mathsf{T})^\mathsf{T},V\rangle\\
&=\langle ab^\mathsf{T},V\rangle
\end{align*}
所以f(X) = a^\mathsf{T}Xb的导数是\nabla f(X)=ab^\mathsf{T}
(b) f(X) = \mathrm{Tr}(X^\mathsf{T}AX),其中 X \in \mathbb{R}^{m \times n} 是长方形矩阵,A 是方阵(但不一定对称)。
解答:
通过定义求解,对于任意方向V\in\mathbb{R}^{m\times n},可以求解:
\begin{align*}
\lim_{t\rightarrow 0}=\dfrac{f(X+tV)-f(X)}{t}&=\lim_{t\rightarrow 0}\dfrac{\mathrm{Tr}((X+tV)^\mathsf{T}A(X+tV))-\mathrm{Tr}(X^\mathsf{T}AX)}{t}\\
&=\lim_{t\rightarrow 0}\dfrac{\mathrm{Tr}(X^\mathsf{T}AX)+t\mathrm{Tr}(X^\mathsf{T}AV)+t\mathrm{Tr}(V^\mathsf{T}AX)+t^2\mathrm{Tr}(V^\mathsf{T}AV)-\mathrm{Tr}(X^\mathsf{T}AX)}{t}\\
&=\lim_{t\rightarrow 0}\dfrac{t(\mathrm{Tr}(X^\mathsf{T}AV)+\mathrm{Tr}(V^\mathsf{T}AX))+t^2\mathrm{Tr}(V^\mathsf{T}AV)}{t}\\
&=\mathrm{Tr}(X^\mathsf{T}AV)+\mathrm{Tr}(V^\mathsf{T}AX)\\
&=\langle A^\mathsf{T}X,V\rangle+\langle V,AX\rangle\\
&=\langle A^\mathsf{T}X+AX,V\rangle
\end{align*}
所以f(X) = \mathrm{Tr}(X^\mathsf{T}AX)的导数是\nabla f(X)=A^\mathsf{T}X+AX
练习2.7
1.考虑二次不等式
x^\mathsf{T}Ax+b^\mathsf{T}x+c\leq 0其中
A为n阶对称矩阵,设C为上述不等式的解集.(a) 证明:当
A正定时,C为凸集。
解答:
对于二次不等式x^\mathsf{T}Ax+b^\mathsf{T}x+c\leq 0进行分析,因为矩阵A对称正定,所以x^\mathsf{T}Ax> 0恒成立,所以该二次型是关于x的凸函数。并且b^\mathsf{T}x+c是线性函数,即x^\mathsf{T}Ax+b^\mathsf{T}x+c\leq 0也是个凸函数,该问题是一个凸优化问题。
要证明C为凸集,则可以利用凸函数的下水平集是凸集的性质,因此集合C是凸函数f(x)对应的下水平集:
C=\{x\in\mathbb{R}^{n}|f(x)\leq 0\}
因此C是凸集,证毕。
也可以通过定义证明,要想证明C是凸集,对于集合C,对于任意的x_1,x_2\in C且\theta\in [0,1],都有
x=\theta x_1+(1-\theta)x_2\in C
则C为凸集。
现在对于任意的x_1,x_2\in C且\theta\in [0,1],有
\begin{align*}
f(x_1)&=x_1^\mathsf{T}Ax_1+b^\mathsf{T}x_1+c\leq 0\\
f(x_2)&=x_2^\mathsf{T}Ax_2+b^\mathsf{T}x_2+c\leq 0\\
x&=\theta x_1+(1-\theta)x_2
\end{align*}
代入f(x)中有:
\begin{align*}
f(x)&=f(\theta x_1+(1-\theta)x_2)\\
&=(\theta x_1+(1-\theta)x_2)^\mathsf{T}A(\theta x_1+(1-\theta)x_2)+b^\mathsf{T}(\theta x_1+(1-\theta)x_2)+c\\
&=\theta^2x_1^\mathsf{T}Ax_1+(1-\theta)^2x_2^\mathsf{T}Ax_2+\theta x_1^\mathsf{T}(1-\theta)x_2+(1-\theta)x_2^\mathsf{T}A\theta x_1+\theta b^\mathsf{T}x_1+(1-\theta)b^\mathsf{T}x_2+c
\end{align*}
利用凸函数的性质,若证明C为凸集,即证明x\in C,则需要满足
f(\theta x_1+(1-\theta)x_2)\leq \theta f(x_1)+(1-\theta)f(x_2)\leq 0
我们先计算该线性组合:
\begin{align*}
\theta f(x_1) + (1-\theta)f(x_2) &= \theta \left( x_1^\mathsf{T}Ax_1 + b^\mathsf{T}x_1 + c \right) + (1-\theta) \left( x_2^\mathsf{T}Ax_2 + b^\mathsf{T}x_2 + c \right) \\
&= \theta x_1^\mathsf{T}Ax_1 + \theta b^\mathsf{T}x_1 + \theta c + (1-\theta)x_2^\mathsf{T}Ax_2 + (1-\theta)b^\mathsf{T}x_2 + (1-\theta)c \\
&= \theta x_1^\mathsf{T}Ax_1 + (1-\theta)x_2^\mathsf{T}Ax_2 + \theta b^\mathsf{T}x_1 + (1-\theta)b^\mathsf{T}x_2 + c
\end{align*}
我们将二者做差,可以得到:
\begin{align*}
\theta f(x_1) + (1-\theta)f(x_2) - f(\theta x_1 + (1-\theta)x_2) &= \theta \left( x_1^\mathsf{T}Ax_1 + b^\mathsf{T}x_1 + c \right) + (1-\theta)\left( x_2^\mathsf{T}Ax_2 + b^\mathsf{T}x_2 + c \right) \\
&\quad - \left( \theta^2 x_1^\mathsf{T}Ax_1 + 2\theta(1-\theta)x_1^\mathsf{T}Ax_2 + (1-\theta)^2 x_2^\mathsf{T}Ax_2 \right. \\
&\quad \left. + \theta b^\mathsf{T}x_1 + (1-\theta)b^\mathsf{T}x_2 + c \right) \\
&= \theta x_1^\mathsf{T}Ax_1 + (1-\theta)x_2^\mathsf{T}Ax_2 + \theta b^\mathsf{T}x_1 + (1-\theta)b^\mathsf{T}x_2 + c \\
&\quad - \theta^2 x_1^\mathsf{T}Ax_1 - 2\theta(1-\theta)x_1^\mathsf{T}Ax_2 - (1-\theta)^2 x_2^\mathsf{T}Ax_2 \\
&= \theta(1-\theta)x_1^\mathsf{T}Ax_1 + (1-\theta)\theta x_2^\mathsf{T}Ax_2 - 2\theta(1-\theta)x_1^\mathsf{T}Ax_2 \\
&= \theta(1-\theta) \left( x_1^\mathsf{T}Ax_1 + x_2^\mathsf{T}Ax_2 - 2x_1^\mathsf{T}Ax_2 \right) \\
&= \theta(1-\theta) (x_1 - x_2)^\mathsf{T}A(x_1 - x_2)
\end{align*}
因为A是对称正定的,所以\forall x都满足x^\mathsf{T}Ax >0,那么(x_1-x_2)^\mathsf{T}A(x_1-x_2)>0,因为\theta\in [0,1],所以\theta (1-\theta)\geq 0,所以等式左边恒大于,即
\begin{align*}
&\theta f(x_1) + (1-\theta)f(x_2) - f(\theta x_1 + (1-\theta)x_2) \geq 0\\
&f(\theta x_1 + (1-\theta)x_2) \leq \theta f(x_1) + (1-\theta)f(x_2)\leq 0
\end{align*}
所以x=\theta x_1+(1-\theta)x_2\in C,C是一个凸集,证毕。
(b) 设
C^\prime是C和超平面g^\mathsf{T} x + h = 0的交集(g \neq 0),若存在\lambda \in \mathbb{R},使得A + \lambda g g^\mathsf{T}半正定,证明:C^\prime为凸集。
解答:
首先通过第一问我们可以得到当A是正定的时候,x^\mathsf{T}Ax+b^\mathsf{T}x+c\leq 0的解集是一个凸集,如果是半正定同理也可以。
现在有g^\mathsf{T}+h=0的约束条件,C^\prime是C和g^\mathsf{T}x+h=0的交集,若要证明C^\prime是凸集,则需要在f(x)基础上加上约束条件并证明其是凸函数。
考虑到f(x)中有二次型x^\mathsf{T}Ax,我们可以增加(g^\mathsf{T}x+h)^2=0的约束条件,并且引入\lambda,可以构造:
\begin{align*}
g(x)&=x^\mathsf{T}Ax+b^\mathsf{T}x+c+\lambda(g^\mathsf{T}x+h)^2\\
&=x^\mathsf{T}Ax+b^\mathsf{T}x+c+\lambda(g^\mathsf{T}x)^2+2\lambda hg^\mathsf{T}x+\lambda h^2\\
&=x^T(A+\lambda gg^\mathsf{T})x+(b^\mathsf{T}+2\lambda hg^\mathsf{T})x+\lambda h^2+c
\end{align*}
现在对g(x)进行分析,其中二次型为x^T(A+\lambda gg^\mathsf{T})x,因为A+\lambda gg^\mathsf{T}是半正定的,所以该二次型是凸函数。而线性部分为(b^\mathsf{T}+2\lambda hg^\mathsf{T})x+\lambda h^2+c也是线性函数,所以g(x)是凸函数。
因为g(x)是一个凸函数,所以其的解集是凸集。因为该函数是由f(x)和约束条件构成的,所以C^\prime就是该解集,即C^\prime就是凸集,证毕。
答案做法(我觉得我的方法比答案好)
练习2.12
1.求下列函数的共轭函数
(b) 矩阵对数:
f(x) = -\ln \det(X)
解答:
对于函数 f(X) = -\ln \det(X),其共轭函数是f^*(X)\sup_{x\in\text{dom }f}(\mathrm{Tr}(Y^\mathsf{T}X)-f(X)),我们令函数\
g(X)=\mathrm{Tr}(Y^\mathsf{T}X)-f(X)=\mathrm{Tr}(Y^\mathsf{T}X)+\ln\det(X)
对其求导,使用行列式求导公式\dfrac{\partial\det (X)}{\partial X}=\det(X)(X^{-1})^\mathsf{T},并另其等于可以得到
\begin{align*}
g^\prime(X)&=Y+\dfrac{1}{\det(X)}\cdot\dfrac{\partial\det(X)}{\partial (X)}\\
&= Y+\dfrac{1}{\det(X)}\cdot\det(X)(X^{-1})^\mathsf{T}\\
&=Y+(X^{-1})^\mathsf{T} =0
\end{align*}
这样就可以得到
X^*=-(Y^{-1})^\mathsf{T}
那么对于共轭函数f^*(Y)=g(X)=\mathrm{Tr}(Y^\mathsf{T}X)+\ln\det(X)则有
\begin{align*}
f^*(Y)&=\mathrm{Tr}(Y^\mathsf{T}(-(Y^{-1})^\mathsf{T}))+\ln\det(-(Y^{-1})^\mathsf{T})\\
&=\mathrm{Tr}(-Y^\mathsf{T}\cdot(Y^\mathsf{T})^{-1})+\ln\det(-Y^{-1})\\
&=\mathrm{Tr}(-I)-\ln\det(-Y)\\
&=-n-\ln\det(-Y)
\end{align*}
所以,f(X) = -\ln \det(X)共轭函数为-n-\ln\det(-Y),并且需要满足Y\prec 0.
最优化理论与方法 作业 2
一、计算次梯度
1.求下列函数的一个次梯度
- (a)
f(x)=\Vert Ax-b\Vert_2+\Vert x\Vert_2;- (b)
f(x)=\inf_y\Vert Ay-x\Vert_\infty这里可以假设能够取到\hat{y},使得\Vert A\hat{y}-x\Vert_\infty=f(x).
解答 (a):
令f_1(x)=\Vert Ax-b\Vert_2, f_2(x)=\Vert x\Vert_2, 则f(x)=f_1(x)+f_2(x),分别处理
对于f_1(x)=\Vert Ax-b\Vert_2,令u=(Ax_1-b)^2+(Ax_2-b)^2+\cdots+(Ax_n-b)^2,则f_1(x)=\sqrt{u},f_1(x)在Ax-b\neq 0时可微,梯度为
\begin{align*}
\dfrac{\partial{f_1(x)}}{\partial{x_i}}&=\dfrac{\partial{f_1(x)}}{\partial{u}}\cdot \dfrac{\partial{u}}{\partial{x_i}}\\
&=\dfrac{1}{2\sqrt{u}}\cdot 2A^\mathsf{T}(Ax_i-b)\\
&=A^\mathsf{T}\dfrac{Ax_i-b}{\Vert Ax_i-b\Vert_2}\\
\dfrac{\partial f_1(x)}{\partial x}&=A^\mathsf{T}\dfrac{Ax-b}{\Vert Ax-b\Vert_2}
\end{align*}
f_1(x) 在 Ax-b=0 不可微,此时的次梯度为 \{A^\mathsf{T} u\mid\Vert u\Vert_2\leq 1\}
这里小于等于1是因为泰勒展开之后\Vert y\Vert_2\geq \nabla f_1(x)^T\cdot y,由于柯西施瓦茨不等式得u^\mathsf{T} y\leq \Vert u\Vert_2\cdot\Vert y\Vert_2,所以需要满足\Vert u\Vert_2\leq 1.
同理对于f_2(x)=\Vert x\Vert_2有当x\neq 0时候,f_2(x)可微,梯度为
\begin{align*}
\dfrac{\partial{f_2(x)}}{\partial{x_i}}&=\dfrac{\partial{f_2(x)}}{\partial{u}}\cdot \dfrac{\partial{u}}{\partial{x_i}}\\
&=\dfrac{1}{2\sqrt{u}}\cdot 2x_i\\
&=\dfrac{x_i}{\Vert x\Vert_2}\\
\dfrac{\partial f_2(x)}{\partial x}&=\dfrac{x}{\Vert x\Vert_2}
\end{align*}
f_2(x) 在 x=0 不可微,此时的次梯度为 \partial f_2(0)=\{u\mid\Vert u\Vert_2\leq 1\} (与上方同理)
故f(x)在x处的一个次梯度为
g=\begin{cases}
A^\mathsf{T}\dfrac{Ax-b}{\Vert Ax-b\Vert_2}+\dfrac{x}{\Vert x\Vert_2}&Ax-b\neq 0,x\neq 0\\
\{A^\mathsf{T} u\mid\Vert u\Vert_2\leq 1\}+\{v\mid\Vert v\Vert_2\leq 1\}&\text{其他}
\end{cases}
解答 (b):
令u=A\hat{y}-x,则f(x)=\Vert u\Vert_\infty,无穷范数取每一个分量绝对值最大的,可以记
I=\{ i\mid \lvert x \rvert = \Vert u\Vert_\infty\}
这样I表示能够取到最大值的分量的下标集合,对于其他的分量需要满足绝对值小于等于1.
对于每一个i\in I,有
\begin{align*}
g_i&=\dfrac{\partial \lvert u_i \rvert}{\partial x_i}\\
&=\dfrac{\partial \lvert (A\hat{y})_i-x_i\rvert}{\partial x_i}\\
&=-\mathrm{sign}(u_i)=-\mathrm{sign}((A\hat{y})_i-x_i)
\end{align*}
其中\mathrm{sign}(u_i)表示u_i的符号,对于其他的分量(i\notin I),需要满足\lvert g_i \rvert\leq 1
故f(x)在x处的一个次梯度为
g=\begin{cases}
-\mathrm{sign}((A\hat{y})_i-x_i)&i\in I\\
\{g_i\mid |g_i|\leq 1\}&i\notin I
\end{cases}
答案和我的有些不太一样,但是也差不多。我不太能理解为什么答案有的时候不写次梯度的范围
-------------------------------------------------
二、线性规划
1.将下面问题转化为线性规划:给定
A\in\R^{m\times n},b\in\R^m
- (a)
\min_{x \in \mathbb{R}^{n}}\|A x-b\|_{1}, \quad \text{s.t. } \|x\|_{\infty} \leqslant 1- (b)
\min_{x \in \mathbb{R}^{n}}\|x\|_{1} , \text{s.t. } \|A x-b\|_{\infty} \leqslant 1- (c)
\min_{x \in \mathbb{R}^{n}}\|A x-b\|_{1}+\|x\|_{\infty}- (d)
\min_{x \in \mathbb{R}^{n}}\sum_{i=1}^{m} \max \left\{0, a_{i}^{\mathrm{T}} x+b_{i}\right\}.
解答 (a):
引入z_i,使得|Ax_i-b_i|\leq z_i,则问题(a)可以转化为
\begin{aligned}
\min_{x,z}\quad &\sum_{i=1}^{m}z_i\\
\text{s.t.}\quad &-z_i\leq Ax_i-b_i\leq z_i\\
&\|x\|_\infty\leq 1\\
&z_i\geq 0
\end{aligned}
解答 (b):
引入z_i,使得|x_i|\leq z_i,则问题(b)可以转化为
\begin{aligned}
\min_{x\in\R^n,z}\quad &\sum_{i=1}^{n}z_i\\
\text{s.t.}\quad &-z_i\leq x_i\leq z_i\\
&\|Ax-b\|_\infty\leq 1\\
&z_i\geq 0
\end{aligned}
在这里\Vert Ax-b\Vert_\infty\leq 1等价于-1\leq (Ax)_i-b_i\leq 1.
解答 (c):
对于\Vert Ax-b\Vert_1引入z_i,则有
\begin{aligned}
\Vert Ax-b\Vert_1&=\sum_{i=1}^{m}z_i\\
\text{s.t.}\quad &-z_i\leq (Ax)_i-b_i\leq z_i\\
z_i\geq 0
\end{aligned}
对于\Vert x\Vert_\infty引入t,则有
\begin{aligned}
\Vert x\Vert_\infty&\leq t\\
\text{s.t.}\quad &-t\leq x_i\leq t\\
t\geq 0
\end{aligned}
所以可以转化为如下问题:
\begin{aligned}
\min_{x\in\R^n,z,t}\quad &\sum_{i=1}^{m}z_i+t\\
\text{s.t.}\quad &-z_i\leq (Ax)_i-b_i\leq z_i\\
&-t\mathbf{1}\leq x\leq t\mathbf{1}\\
&z_i\geq 0,t\geq 0
\end{aligned}
解答 (d):
引入z_i,令z_i\geq \max \{0,a_i^\mathsf{T} x+b_i\},即
z_i\geq a_i^\mathsf{T} x+b_i,z_i\geq 0
则问题(d)可以转化为
\begin{aligned}
\min_{x\in\R^n,z}\quad &\sum_{i=1}^{m}z_i\\
\text{s.t.}\quad &z_i\geq a_i^\mathsf{T} x+b_i\\
&z_i\geq 0
\end{aligned}
这里也可以写作z\geq Ax+b.
三、复合函数计算导数
1.在数据插值中,考虑一个简单的复合模型(取
\phi为恒等映射,两层复合模型):\min_{X_1\in\R^{q\times p},X_2\in\R^{q\times q}} \sum_{i=1}^m\Vert X_2X_1a_i-b_i\Vert_2^2,其中
a_i\in\R^p,b_i\in\R^q,i=1,2,\cdots,m.
- (a)试计算目标函数关于
X_1,X_2的导数;- (b)试给出该问题的最优解.
解答 (a):
这里方便计算,引入如下变量A,B:
A=(a_1,a_2,\cdots,a_m)^\mathsf{T},B=(b_1,b_2,\cdots,b_m)^\mathsf{T}\\
A\in\R^{m\times p},B\in\R^{m\times q}
那么问题可以写作
f(X_1,X_2)=\sum_{i=1}^m\Vert X_2X_1a_i-b_i\Vert_2^2=\Vert X_2X_1A-B\Vert_F^2
这里\Vert \cdot \Vert_F表示Frobenius范数。
对f(X_1,X_2)可以展开为:
\begin{aligned}
f(X_1,X_2)&=\Vert X_2X_1A-B\Vert_F^2\\
&=\mathrm{Tr}((X_2X_1A-B)(X_2X_1A-B)^\mathsf{T})\\
&=\mathrm{Tr}(X_2X_1AA^\mathsf{T} X_1^\mathsf{T} X_2^\mathsf{T})-2\mathrm{Tr}(BA^\mathsf{T} X_1^\mathsf{T} X_2^\mathsf{T})+\mathrm{Tr}(BB^\mathsf{T})
\end{aligned}
对于X_1求导,有
\begin{aligned}
\dfrac{\partial f}{\partial X_1}&= \dfrac{\partial}{\partial X_1}\mathrm{Tr}(X_2X_1AA^\mathsf{T} X_1^\mathsf{T} X_2^\mathsf{T})-2\dfrac{\partial}{\partial X_1}\mathrm{Tr}(BA^\mathsf{T} X_1^\mathsf{T} X_2^\mathsf{T})+\dfrac{\partial}{\partial X_1}\mathrm{Tr}(BB^\mathsf{T})\\
&=(AA^\mathsf{T} X_1^\mathsf{T} X_2^\mathsf{T} X_2)^\mathsf{T}+X_2^TX_2X_1AA^\mathsf{T}-2X_2^\mathsf{T} BA^\mathsf{T}+0\\
&=2X_2^\mathsf{T} X_2X_1AA^\mathsf{T}-2X_2^\mathsf{T} BA^\mathsf{T} \\
&=2X_2^\mathsf{T} (X_2X_1A-B)A^\mathsf{T}
\end{aligned}
对于X_2求导,同理有
\dfrac{\partial f}{\partial X_2}=2(X_2X_1A-B)A^\mathsf{T} X_1^\mathsf{T}
所以目标函数关于X_1,X_2的导数分别为:
\dfrac{\partial f}{\partial X_1}=2X_2^\mathsf{T} (X_2X_1A-B)A^\mathsf{T},\quad \dfrac{\partial f}{\partial X_2}=2(X_2X_1A-B)A^\mathsf{T} X_1^\mathsf{T}
解答 (b):
有(a)中可以将问题转化求解\min \Vert X_2X_1A-B\Vert_F^2,这里令X=X_2X_1,则问题可以转化为
\min_{X\in\R^{q\times p}}\Vert XA-B\Vert_F^2
令g(X)=\Vert XA-B\Vert_F^2,则有
\begin{aligned}
g(X)&=\Vert XA-B\Vert_F^2\\
&=\mathrm{Tr}((XA-B)(XA-B)^\mathsf{T})\\
&=\mathrm{Tr}(XAA^\mathsf{T} X^\mathsf{T})-2\mathrm{Tr}(BA^\mathsf{T} X^\mathsf{T})+\mathrm{Tr}(BB^\mathsf{T})
\end{aligned}
对函数g(X)求导,有
\begin{aligned}
\dfrac{\partial g}{\partial X}&=2XAA^\mathsf{T}-2BA^\mathsf{T}\\
&=2(XA-B)A^\mathsf{T}
\end{aligned}
令导数为,有XA=B,即X=BA^{-1},所以问题的最优解需要X_1,X_2满足X_2X_1=BA^{-1}即可取到函数的最小值.
最优化理论与方法 作业 3
一、梯度法的精确步长
1.
f为正定二次函数f(x)=\frac{1}{2}x^\mathsf{T} Ax+b^\mathsf{T} x,d^k为下降方向,x^k为当前迭代点. 试求出精确线搜索步长\begin{equation} \alpha_k=\arg\min_{\alpha>0}f(x^k+\alpha d^k)\notag \end{equation}并由此推出最速下降法的步长满足(6.2.2)式(见定理6.2).
解答:
首先我们对目标函数f(x^k+\alpha d^k)进行展开得到:
\begin{align*}
f(x^k+\alpha d^k)&=\frac{1}{2}(x^k+\alpha d^k)^\mathsf{T} A(x^k+\alpha d^k)+b^\mathsf{T} (x^k+\alpha d^k)\\
&= \frac{1}{2}((x^k)^\mathsf{T} +\alpha (d^k)^\mathsf{T})A(x^k+\alpha d^k)+b^\mathsf{T} x^k+\alpha b^\mathsf{T} d^k\\
&=\frac{1}{2}[(x^k)^\mathsf{T} Ax^k+\alpha (x^k)^\mathsf{T} Ad^k+\alpha(d^k)^\mathsf{T} Ax^k+\alpha^2 (d^k)^\mathsf{T} d^k]+b^Tx^k+\alpha b^\mathsf{T} d^k\tag{1}
\end{align*}
因为f为正定二次函数,所以A需要满足对称正定,所以有(x^k)^\mathsf{T} Ad^k=(d^k)^\mathsf{T} Ax^k,所以上式(1)可以化简为:
\begin{align*}
f(x^k+\alpha d^k)&=\frac{1}{2}[(x^k)^\mathsf{T} Ax^k+2\alpha (x^k)^\mathsf{T} Ad^k+\alpha^2 (d^k)^\mathsf{T} d^k]+b^Tx^k+\alpha b^\mathsf{T} d^k\\
&=\frac{1}{2}(x^k)^\mathsf{T} Ax^k+\alpha (x^k)^\mathsf{T} Ad^k+\frac{1}{2}\alpha^2 (d^k)^\mathsf{T} Ad^k+b^\mathsf{T} x^k+\alpha b^Td^k\\
&=f(x^k)+\alpha (x^k)^\mathsf{T} Ad^k+\frac{1}{2}\alpha^2(d^k)^\mathsf{T} Ad^k+\alpha b^Td^k\\
&=f(x^k)+\alpha ((x^k)^\mathsf{T} Ad^k+b^Td^k)+\frac{1}{2}\alpha^2(d^k)^\mathsf{T} Ad^k \tag{2}
\end{align*}
因为f(x)的梯度为\nabla f(x)=Ax+b,所以有\nabla f(x^k)=Ax^k+b,所以有:
\begin{align*}
\nabla f(x^k)^\mathsf{T} d^k=(x^k)^\mathsf{T} Ad^k+b^\mathsf{T} d^k
\end{align*}
代入(2)式中得到:
\begin{align*}
f(x^k+\alpha d^k)=f(x^k)+\alpha \nabla f(x^k)^\mathsf{T} d^k+\frac{1}{2}\alpha^2(d^k)^\mathsf{T} Ad^k
\end{align*}
要求出\alpha_k,只需要对上式求导数并令其为0即可:
\begin{align*}
\frac{d}{d\alpha}f(x^k+\alpha d^k)=\nabla f(x^k)^\mathsf{T} d^k+\alpha(d^k)^\mathsf{T} Ad^k=0
\end{align*}
可以得到:
\begin{align*}
\alpha_k=-\frac{\nabla f(x^k)^\mathsf{T} d^k}{(d^k)^\mathsf{T} Ad^k}
\end{align*}
而最速下降法的下降方向d^k=-\nabla f(x^k),所以有:
\begin{align*}
\alpha_k=-\frac{\nabla f(x^k)^\mathsf{T} (-\nabla f(x^k))}{(-\nabla f(x^k))^\mathsf{T} A(-\nabla f(x^k))}=\frac{\nabla f(x^k)^\mathsf{T} \nabla f(x^k)}{\nabla f(x^k)^\mathsf{T} A\nabla f(x^k)}
\end{align*}
所以得到了最速下降法的步长满足(6.2.2)式:
\begin{align*}
\alpha_k=\frac{\Vert \nabla f(x^k)\Vert ^2}{\nabla f(x^k)^\mathsf{T} A\nabla f(x^k)}
\end{align*}
最优化理论与方法 作业 4
一、对偶问题
1.计算下列优化问题的对偶问题.
(a)
\min_{x\in\R^n} \quad \Vert x\Vert_1, s.t.Ax=b;(b)
\min_{x\in\R^n} \quad \Vert Ax-b\Vert_1;(c)
\min_{x\in\R^n} \quad \Vert Ax-b\Vert_\infty;(d)
\min_{x\in\R^n} \quad x^\mathsf{T} Ax+2b^\mathsf{T} x, s.t.\Vert x\Vert_2^2\leq 1,其中A为正定矩阵.
解答 (a):
引入拉格朗日乘子\nu\in\R^m,构造拉格朗日函数
\begin{align*}
L(x,\nu)&=\Vert x\Vert_1+\nu^\mathsf{T}(Ax-b)\notag\\
&=\sum_{i=1}^n(\vert x_i\vert+\color{red}\nu_i^\mathsf{T} a_i x_i\color{black})-\nu^\mathsf{T} b\notag
\end{align*}
感谢楠姐的提醒,其实这里不能写成
\color{red}\nu_i^\mathsf{T} a_i x_i,因为这样首先a_i没有定义,就算是列向量的话,三个的乘法是数 乘 向量 乘 数,所以并不是一个标量,应该写成\sum \nu_ia_i^\mathsf{T}x。这样x是单独的,而前面的系数好进行分析。
在这个题的所有小问可能都有该问题
推荐:有一个好的办法是,我们可以令\color{blue}c=A^\mathsf{T}\nu,这样对c_i进行分析会好一些(像答案那样,如下图)
要使得\min_x L(x,\nu)存在,需要满足\forall i\in\{1,2,\cdots,n\},有
\begin{align*}
-1\leq \nu_i^\mathsf{T} a_i\leq 1\notag
\end{align*}
即可以写作
\begin{align*}
&\vert \nu_i^\mathsf{T} a_i\vert\leq 1\notag,\forall i\in\{1,2,\cdots,n\}\\
&\Vert \nu^\mathsf{T} A\Vert_\infty\leq 1\notag
\end{align*}
由此可以得到对偶问题
\begin{align*}
\max \quad &-\nu^\mathsf{T} b,\notag\\
\text{s.t.}\quad &\Vert \nu^\mathsf{T} A\Vert_\infty\leq 1.\notag
\end{align*}
解答 (b):
令y=Ax-b,则原问题可以写作
\begin{align*}
\min_{y\in\R^m} \quad &\Vert y\Vert_1\notag\\
\text{s.t.}\quad &Ax-b=y\notag
\end{align*}
引入拉格朗日乘子\nu\in\R^m,构造拉格朗日函数
\begin{align*}
L(y,\nu)&=\Vert y\Vert_1+\nu^\mathsf{T}(Ax-b-y)\notag\\
&=\Vert y\Vert_1+\nu^\mathsf{T} Ax-\nu^\mathsf{T} y-\nu^\mathsf{T} b\notag
\end{align*}
要使得\min_y L(y,\nu)存在,需要满足\forall i\in\{1,2,\cdots,m\},有
\begin{align*}
-1\leq \nu_i\leq 1\\
\nu^\mathsf{T} A=0
\end{align*}
即可以写作
\begin{align*}
\Vert \nu\Vert_\infty\leq 1\\
\nu^\mathsf{T} A=0
\end{align*}
由此可以得到对偶问题
\begin{align*}
\max \quad &-\nu^\mathsf{T} b,\\
\text{s.t.}\quad &\Vert \nu\Vert_\infty\leq 1,\\
&\nu^\mathsf{T} A=0.
\end{align*}
解答 (c):
\min_{x\in\mathbb{R}^n}\quad \Vert Ax-b\Vert_\infty
令t=\Vert Ax-b\Vert_\infty,则有:
\begin{aligned}
Ax-b&\leq t\mathbf{1},\\
Ax-b&\geq -t\mathbf{1}.
\end{aligned}\notag
因为我们的\lambda_1,\lambda_2为非负,所以同一写成小于等于的形式,有:
\begin{aligned}
Ax-b-t\mathbf{1}&\leq 0,\\
-t\mathbf{1}-Ax+b&\leq 0.
\end{aligned}\notag
那么则有拉格朗日函数L(x,t,\lambda_1,\lambda_2):
L(x,t,\lambda_1,\lambda_2)=t+\lambda_1^\mathsf{T}(Ax-b-t\mathbf{1})+\lambda_2^\mathsf{T}(-t\mathbf{1}-Ax+b)
对x,t分别求导,有:
\begin{aligned}
\dfrac{\partial L}{\partial x}&=\lambda_1^\mathsf{T}A-\lambda_2^\mathsf{T}A=0\\
\dfrac{\partial L}{\partial t}&=1-\lambda_1^\mathsf{T}\mathbf{1}-\lambda_2^\mathsf{T}\mathbf{1}=0
\end{aligned}\notag
L有最小值,对偶问题为
\begin{aligned}
\max \quad &-\lambda_1^\mathsf{T}b+\lambda_2^\mathsf{T}b\\
\mathrm{s.t.}\quad &\lambda_1^\mathsf{T}A-\lambda_2^\mathsf{T}A=0\\
&1-\lambda_1^\mathsf{T}\mathbf{1}-\lambda_2^\mathsf{T}\mathbf{1}=0\\
&\lambda_1,\lambda_2\geq 0
\end{aligned}\notag
解答 (d):
\Vert x\Vert_2^2\leq 1可以写作x^\mathsf{T} x\leq 1,引入拉格朗日乘子\lambda\in\R,构造拉格朗日函数
\begin{align*}
L(x,\lambda)&=x^\mathsf{T} Ax+2b^\mathsf{T} x+\lambda(x^\mathsf{T} x-1)\notag\\
&=x^T(A+\lambda I)x+2b^\mathsf{T} x-\lambda\notag
\end{align*}
设对偶函数为g(\lambda)=\inf_x L(x,\lambda),则需要满足\forall x\in\R^n,有
\begin{align*}
\nabla_x L(x,\lambda)=2(A+\lambda I)x+2b=0\notag
\end{align*}
解得
\begin{align*}
x=-(A+\lambda I)^{-1}b\notag
\end{align*}
代入L(x,\lambda)得到
\begin{align*}
g(\lambda)=-b^\mathsf{T}(A+\lambda I)^{-1}b-\lambda\notag
\end{align*}
由于A是正定矩阵,所以在\lambda\geq 0情况下,A+\lambda I也为正定矩阵,所以此时逆矩阵存在,所以对偶问题为
\begin{align*}
\max \quad &-b^\mathsf{T}(A+\lambda I)^{-1}b-\lambda\notag\\
\text{s.t.}\quad &\lambda\geq 0\notag
\end{align*}
二、KKT点
考虑优化问题
\begin{align*} \min_{x\in\R^2}\quad &x_1,\\ \text{s.t.}\quad &16-(x_1-4)^2-x_2^2\geq 0,\\ \quad &x_1^2+(x_2-2)^2-4=0. \end{align*}求出该优化问题的KKT点.
解答:
首先将16-(x_1-4)^2-x_2^2\geq 0写作x_1^2-8x_1+x_2^2\leq 0,
引入拉格朗日乘子\lambda,\nu\geq 0,构造拉格朗日函数
\begin{align*}
L(x_1,x_2,\lambda,\nu)&=x_1+\lambda(x_1^2-8x_1+x_2^2)+\nu(x_1^2+(x_2-2)^2-4)\notag\\
&=(\lambda+\nu)x^2+(1-8\lambda)x_1+(\lambda+\nu)x_2^2-4\nu x_2
\end{align*}
对x_1,x_2分别求导数得到
\begin{align*}
\frac{\partial L}{\partial x_1}&=2(\lambda+\nu)x_1+(1-8\lambda)=0\notag\\
\frac{\partial L}{\partial x_2}&=2(\lambda+\nu)x_2-4\nu=0\notag
\end{align*}
互补松弛条件为\lambda(x_1^2-8x_1+x_2^2)=0,\lambda\geq 0,并且等式约束满足x_1^2+(x_2-2)^2-4=0,同时原始的约束条件为16-(x_1-4)^2-x_2^2\geq 0,若\lambda =0则稳定性条件为
\begin{align*}
2\nu x_1+1=0,\\
2\nu x_2-4\nu=0.
\end{align*}
代入等式约束可以得到:x_1=\pm 2,此时得到KKT点为(2,2,0,-\frac{1}{4})和(-2,2,0,\frac{1}{4}).但第二个不满足条件,只有第一个满足,所以取(2,2,0,-\frac{1}{4})为KKT点.
若\lambda >0,此时不等式约束为
x_1^2-8x_1+x_2^2=0
结合等式约束解方程组:
\begin{align*}
\begin{cases}
x_1^2-8x_1+x_2^2=0\\
x_1^2+(x_2-2)^2-4=0
\end{cases}
\end{align*}
得到解为(x_1,x_2)=(0,0)和(x_1,x_2)=(\frac{8}{5},\frac{16}{5})
检查这些点是否满足不等式约束,即都满足。
所以KKT点为(0,0,\frac{1}{8},0)和(\frac{8}{5},\frac{16}{5},\frac{3}{40},-\frac{1}{5})和(2,2,0,-\frac{1}{4}).
三、支持向量机
考虑支持向量机问题
\begin{align*} \min_{x\in\R^n,\zeta}\quad &\frac{1}{2}\Vert x\Vert_2^2+\mu\sum_{i=1}^m\zeta_i,\\ \text{s.t.}\quad &b_ia_i^\mathsf{T} \geq 1-\zeta_i, i=1,2,\cdots,m,\\ &\zeta_i\geq 0, i=1,2,\cdots,m. \end{align*}其中
\mu> 0为常数且b_i\in\R,a_i\in\R^n,i=1,2,\cdots,m是已知的。写出该问题的对偶问题。
解答:
首先对于不等式约束写作
\begin{align*}
1-\zeta_i -b_ia_i^\mathsf{T} \leq 0\\
-\zeta_i\leq 0\notag
\end{align*}
首先构建拉格朗日函数,引入拉格朗日乘子\lambda\in\R^m,\nu\in\R^m,构造拉格朗日函数
\begin{align*}
L(x,\zeta,\lambda,\nu)&=\frac{1}{2}\Vert x\Vert_2^2+\mu\sum_{i=1}^m\zeta_i+\sum_{i=1}^m\lambda_i(1-\zeta_i-b_ia_i^\mathsf{T})-\sum_{i=1}^m\nu_i\zeta_i\notag\\
&=\frac{1}{2}\|x\|_{2}^{2}-(\sum_{i=1}^{m}\lambda_{i}b_{i}a_{i}^\mathsf{T})x+\sum_{i=1}^{m}(\mu-\lambda_{i}-\nu_{i})\xi_{i}+\sum_{i=1}^{m}\lambda_{i}.
\end{align*}
对x,\zeta求偏导得到
\begin{align*}
\frac{\partial L}{\partial x}&=x-\sum_{i=1}^m\lambda_ib_ia_i^\mathsf{T}=0\notag\\
\frac{\partial L}{\partial \zeta_i}&=\mu-\lambda_i-\nu_i=0\notag
\end{align*}
进一步得到
\begin{align*}
x=\sum_{i=1}^m\lambda_ib_ia_i^\mathsf{T}\\
\mu-\lambda_i-\nu_i=0
\end{align*}
代入拉格朗日函数得到
\begin{align*}
L(x,\zeta,\lambda,nu)=-\frac{1}{2}\Vert \sum_{i=1}^m \lambda_ib_ia_i\Vert_2^2+\sum_{i=1}^m\lambda_i
\end{align*}
所以对偶问题为
\begin{align*}
\max \quad &-\frac{1}{2}\Vert \sum_{i=1}^m \lambda_ib_ia_i\Vert_2^2+\sum_{i=1}^m\lambda_i,\\
\text{s.t.}\quad &\lambda_i\geq 0, i=1,2,\cdots,m,\\
&\mu-\lambda_i-\nu_i=0, i=1,2,\cdots,m,\\
&\nu_i\geq 0, i=1,2,\cdots,m.
\end{align*}
消去\nu_i得到
\begin{align*}
\max \quad &-\frac{1}{2}\Vert \sum_{i=1}^m \lambda_ib_ia_i\Vert_2^2+\sum_{i=1}^m\lambda_i,\\
\text{s.t.}\quad &\lambda_i\geq 0, i=1,2,\cdots,m,\\
&\mu-\lambda_i\geq 0, i=1,2,\cdots,m.
\end{align*}
证明题
- 凸优化问题的可行域、解集都是凸集
- 弱对偶原理
- Slater条件满足时,KKT条件是凸问题全局最优解的一阶充要条件
- Slater条件说明强对偶性成立,且最优化可以达到
- 必要性,充要性
- 交替方向乘子法的收敛性准则
【凸优化问题的可行域、解集都是凸集】
标准形式的凸优化问题:
\begin{align}
\min _{x \in D} \quad & f(x) \\
\text { s.t. } \quad & g_i(x) \leq 0, \quad i=1, \ldots, m \\
& A x=b
\end{align}
- 目标函数
f、不等式约束条件g_i都是凸函数,必须是Ax=b - 定义域
D=\text{dom }f\cap (\cap_{i=1}^m\text{dom }g_i)通常省略 - 可行域为
X=D\cap\{x\mid g_i(x)\leq 0,i=1,2,\cdots,m,Ax=b\}
凸优化问题的可行域为凸集
证明:
凸函数的定义域为凸集,任意多凸集的交为凸集\Rightarrow 定义域D是凸集.
利用凸函数的定义可以得到\{x\mid g_i(x)\leq 0\}为凸集.
线性方程组的解集\{x\mid Ax=b\}为凸集,于是证明X为凸集.
(在凸优化问题中,g_i(x)被要求是凸函数)
凸优化问题的解集是凸集
若X_\mathsf{opt}为下面凸优化问题的解集,即
\begin{aligned}
&X_\mathsf{opt}=\operatorname*{argmin}_x ~f(x)\\
\text{s.t}\quad &g_i(x)\leq 0,\quad i=1,...,m,\\
&Ax=b
\end{aligned}
证明:X_\mathsf{opt}是凸集
首先来看凸集的定义:
一个集合
C是凸集,当且仅当对于任意x,y\in C和t\in[0,1],点z=tx+(1-t)y\in C
- 若
x,y是凸优化问题的解,则f(x)=f(y)=f^*。 - 对于任意的
0\leq t\leq 1,设z=tx+(1-t)y,有g_i(tx+(1-t)y)\leq tg_i(x)+(1-t)g_i(y)\leq 0(约束条件g_i(z)\leq 0)A(tx+(1-t)y)=tAx+(1-t)Ay=b(线性约束Az=b)f(t x+(1-t)y)\le t f(x)+(1-t)f(y)=f^{*}
- (由上面三条可得,点
z=tx+(1-t)y既满足所有约束条件,又达到目标函数的最优值f^*,所以z也是解) - 由于对于任意
x,y\in X_\mathsf{opt}和t\in [0,1],都能证明z=tx+(1-t)y\in X_\mathsf{opt},因此X_\mathsf{opt}是一个凸集 - (CarryOS:所以
tx+(1-t)y也是凸优化问题的解)
【弱对偶原理】
定理(弱对偶原理)
若
\lambda\geq 0,则g(\lambda,\nu)\leq p^*.
证明:
首先来看L(x,\lambda,\nu)的性质。对于任意的x\in\mathcal{X}(满足原问题约束的x)有:
L(x,\lambda,\nu)=f_{0}(x)+\sum_{i}\lambda_{i}g_{i}(x)+\nu^{T}h(x).
因为\lambda_i\geq 0,g_i(x)\leq 0,所以\lambda_ig_i(x)\leq 0,又\nu^\mathsf{T}h(x)=0,所以
\color{blue}{L(x,\lambda, \nu)\leq f_0(x)}
(直观感受:通过引入约束条件的惩罚项,拉格朗日函数始终是原目标函数的“放松版”或下界,始终是一个较低的值。)
再来看对x取下确界inf。从定义可知
\color{green}{g(\lambda,\nu)=\operatorname*{inf}_{x}L(x,\lambda,\nu),}
因此对于任意的x\in\mathcal{X}有:
g(\lambda,\nu)\le L(x,\lambda,\nu).
若\tilde{x}\in \mathcal{X}且\lambda \geq 0,则
\color{green}{g(\lambda,\nu)=\inf_x L(x,\lambda,\nu)} \color{black}{\leq} \color{blue}{L(\tilde{x},\lambda,\nu)\leq f_0(\tilde{x})}
对\tilde{x}取下界(对所有可能的\tilde{x}取下确界)得
g(\lambda,\nu)\leq \inf_{\tilde{x}\in\mathcal{X}} f_0(\tilde{x})=p^*
Slater条件满足时,KKT条件是凸问题全局最优解的一阶充要条件
- Slater条件说明强对偶性成立,且最优化可以达到
- 必要性,充要性
【如果凸优化问题(5.6.1)满足 Slater条件,则强对偶原理成立】
证明:(太多了,我赌他不考,在书的P193-P195,定理5.12)
【必要性】
若强对偶性成立(比如Slater条件满足),x^*和\lambda^*,\nu^*分别是原始和对偶最优解,则有:
\begin{aligned}
f_{0}\left(x^{*}\right)=g\left(\lambda^{*}, \nu^{*}\right) & =\inf _{x} f_{0}(x)+\sum_{i=1}^{m} \lambda_{i}^{*} f_{i}(x)+\nu^{* T}(A x-b) \\
& \leq f_{0}\left(x^{*}\right)+\sum_{i=1}^{m} \lambda_{i}^{*} f_{i}\left(x^{*}\right)+\nu^{* T}\left(A x^{*}-b\right) \\
& \leq f_{0}\left(x^{*}\right)
\end{aligned}
最后一个不等式由弱对偶原理得到. 故上面两个不等式都是等式
-
x^*极小化L(x,\lambda^*,\nu^*),可得稳定性条件 -
\lambda_{i}^{*}f_{i}(x^{*})=0,i=1,\cdot\cdot\cdot\cdot,m,可得互补松弛条件- 互补松弛体现在下面的式子
\lambda_{i}^{*}>0\Longrightarrow f_{i}(x^{*})=0,\qquad f_{i}(x^{*})<0\Longrightarrow\lambda_{i}^{*}=0
- 情况 1:如果
f_i(x^∗)=0(约束活跃):- 这说明约束
f_i(x^*)\leq 0对最优解起到了直接作用,即这个约束将x^*限制在它的边界上。此时,\lambda_i^*\gt 0,表示这个约束对优化的贡献(或者“约束作用力”)是正的。
- 这说明约束
-
情况 2:如果
f_i(x^*)\lt 0(约束不活跃):- 这说明约束
f_i(x^*)\leq 0附近并未限制优化过程,约束是“松弛”的,即f_i(x)没有紧逼边界。此时,\lambda_i^* = 0,表示这个约束对最优解没有直接影响,也无需在优化过程中参与。
(注:对于一般的约束优化问题, KKT条件也是局部最优解的必要条件.)
- 这说明约束
【充分性】
- 设存在
(\bar{x},\bar{\lambda},\bar{\nu})满足KKT条件,考虑凸优化问题的拉格朗日函数
L(x,\lambda,\nu)=f_{0}(x)+\sum_{i=1}^{m}\lambda_{i}f_{i}(x)+\nu^{T}(A x-b).
-
固定
\lambda=\bar\lambda,\nu=\bar\nu,注意到\bar{\lambda}_{i}\ge0,i=1,\cdots,m以及\bar{\nu}^{T}(A x-b)是仿射函数,于是L(x,\bar\lambda,\bar{\nu})是关于x的凸函数 -
由凸函数全局最优点的一阶充要性可知,此时
\bar x就是L(x,\bar\lambda,\bar{\nu})的全局极小点.根据拉格朗日对偶函数的定义,可得
L(\bar{x},\bar{\lambda},\bar{\nu})=\operatorname*{inf}_{x\in\mathcal{D}}L(x,\bar{\lambda},\bar{\nu})=g(\bar{\lambda},\bar{\nu}).
(凸函数的一阶最优值条件)对于一个凸函数
f(x),如果x^*是其定义域内的一个点,并且满足\nabla f(x^*)=0则
x^*是f(x)的全局最优解
- 根据原始可行性条件
A\bar{x}=b以及互补松弛条件\bar{\lambda_i}f_i(\bar{x})=0,可得
L(\bar{x},\bar{\lambda},\bar{\nu})=f_{0}(\bar{x})+0+0=f_{0}(\bar{x}).
- 根据弱对偶原理,得到
L(\bar{x},\bar{\lambda},\bar{\nu})=f_{0}(\bar{x})\ge p^{*}\ge d^{*}\ge g(\bar{\lambda},\bar{\nu})=L(\bar{x},\bar{\lambda},\bar{\nu})\Rightarrow p^{*}=d^{*}.
故\bar{x}和\bar\lambda,\bar\nu分别是原始问题和对偶问题的最优解.
总结:
- 必要性:如果
x^*是原问题的最优解,且问题满足 强对偶性(例如 Slater 条件),那么x^*必须满足 KKT 条件。- 充分性:如果
x^*,\lambda^*,\nu^*满足 KKT 条件,且问题是 凸优化问题,那么x^*一定是原问题的全局最优解。
【交替方向乘子法的收敛性准则】
(我不知道在哪里)
ADMM收敛性准则:
- 检测前述两个残差
r^k,s^k是否充分小:
0\approx||r^{k}||=||A_{1}x_{1}^{k}+A_{2}x_{2}^{k}-b|| \qquad \text{(原始可行性)}\\
0\approx||s^{k}||=||A_{1}^{\mathrm{T}}A_{2}(x_{2}^{k-1}-x_{2}^{k})||\qquad \text{(对偶可行性)}
致谢
- 感谢楠姐指出的两处错误(定义域和可行域的错误以及标注错误)
- 感谢杜哥作为第一个读者的精神支持