
一、实验内容
- 建立一个编程环境,实现读入三维物体,进行线框显示,shading, 纹理映射以及旋转,zoom in/out等功能。
- 读入的三维模型: 点云,mesh,volume model,NURBS
本实验的代码存放在https://github.com/CarryNotKarry/VRlab1
二、实验设计
2.1 实现内容
(包括问题描述、核心算法、技术难点等)
本实验实现读入三维模型有:点云(.xyz)以及mesh(.obj)形式,并且完成了纹理(.png)映射。实现了读入三维物体,可以进行线框显示,并且完成了着色(shading)、旋转(rotate)以及摄像机缩放(zoom in/out)等功能。并且实现了鼠标和键盘的交互事件。
数据使用的如下:
- mesh文件使用的是GAMES101作业3中的奶牛,将其
.svg文件转化为.png文件进行读入进而纹理贴图。 - pointcloud文件使用的是PUNet数据集中的测试集中50k点的
camel.xyz文件。
环境使用的是OpenGL以及GLUT库,在Visual Studio 2022进行运行。
2.2 核心算法
- 数据结构
首先创建四个结构体Vertex、Normal、TexCoord以及Face,分别来存储点、法线、纹理坐标以及面,多个数据的时候使用的是std::vector进行存储。
- 三维模型的读入以及绘制
设计了OBJLoader类以及PointCloud类。
-
OBJLoader类使用自定义的OBJ模型读取网格模型的顶点、法线、纹理坐标等信息。主要成员变量有:
变量 备注 GLuint textureId;纹理ID vector<Vertex> vertices;点坐标 vector<TexCoord> texcoords;纹理坐标 vector<Face> faces;面 string obj_filename;OBJ文件路径 string texture_filename;纹理文件路径 主要类函数(多个重名函数只写其一)如下:
函数 备注 void loadOBJ(const string& filename);加载OBJ文件 void loadTexture(const string& filename);加载PNG纹理 void setObjFilename(const string& name)赋值OBJ地址 void setTextureFilename(const string& name)赋值PNG地址 void drawOBJ(bool WIREFRAME_MODE);绘制图形 该难点主要是在对文件的读入,因为OBJ文件较为复杂,所以需要对每一行进行判断是否是
v、vn、vt还是f,并且保存至对应的数据结构中。因篇幅有限,这里展示对于OBJ文件逐行读入的处理代码:
while (getline(file, inputline)) { if (inputline[0] 'v' && inputline[1] ' ') { // 如果是顶点 istringstream in(inputline.substr(2)); Vertex v; in >> v; vertices.push_back(v); } else if (inputline[0] 'v' && inputline[1] 'n' && inputline[2] ' ') { // 如果是法线 istringstream in(inputline.substr(3)); Normal n; in >> n; normals.push_back(n); } else if (inputline[0] 'v' && inputline[1] 't' && inputline[2] ' ') { // 如果是纹理坐标 istringstream in(inputline.substr(3)); TexCoord t; in >> t; texcoords.push_back(t); } ... // 后续处理面(f)代码未展示 }加载纹理时(WIN环境下)则需要调整一下UV才可以使得纹理方向正确,在加载OBJ文件时,每个面由顶点、法线和纹理坐标组成。在绘制时则需要将每一个面片对应相应的纹理坐标,纹理坐标(
texcoords)与顶点索引(vertexIndices)相匹配,用于在渲染时正确映射纹理图像到模型的表面上。glEnable(GL_TEXTURE_2D); // 启用2D纹理 glBegin(GL_TRIANGLES); // 开始绘制三角形 for (const auto& face : faces) { // 遍历faces中所有的面 for (int i = 0; i < face.vertexIndices.size(); i++) { // 遍历面中每一个顶点 int vi = face.vertexIndices[i]; // 顶点索引 int ni = face.normalIndices[i]; // 法线索引 int ti = face.texcoordIndices[i]; // 纹理坐标索引 if (ni >= 0 && ni < normals.size()) { // 如果法线索引合法 glNormal3f(normals[ni].nx, normals[ni].ny, normals[ni].nz); } if (ti >= 0 && ti < texcoords.size()) { // 如果纹理坐标索引合法 glTexCoord2f(texcoords[ti].u, texcoords[ti].v); } glVertex3f(vertices[vi].x, vertices[vi].y, vertices[vi].z); // 指出顶点位置 } } glEnd(); glDisable(GL_TEXTURE_2D); // 禁用2D纹理 -
PointCloud类而该类相较而言比较简单,主要成员变量如下:
变量 备注 vector<Vertex> points;存储点云的顶点 string filename;文件路径 GLfloat pointColor[3];绘制点的颜色 函数如下:
函数 备注 void loadXYZ(const std::string& filename);加载XYZ文件,读取点云坐标 void setFilename(const std::string& name);赋值文件路径 void drawPointCloud(bool highlight, bool wireframeMode);绘制点云 与mesh文件处理类似,也是读入之后进行绘制,不过这里有一个高亮模式,将 y 坐标从 -1 到 1 的范围映射到 0 到 1 的范围,使得点的颜色在灰度上变化,否则使用函数内的设置的颜色。
部分重要代码如下:
void PointCloud::drawPointCloud(bool highlight, bool wireframeMode) { if (highlight) { glPointSize(2.0f); glBegin(GL_POINTS); for (const auto& v : points) { float intensity = (v.y + 1.0f) / 2.0f; glColor3f(intensity, intensity, intensity); // 将 y 坐标从 -1 到 1 的范围映射到 0 到 1 的范围,使得点的颜色在灰度上变化 glVertex3f(v.x, v.y, v.z); } glEnd(); } else { glColor3f(pointColor[0], pointColor[1], pointColor[2]); glPolygonMode(GL_FRONT_AND_BACK, GL_FILL); glBegin(GL_POINTS); for (const auto& v : points) { glVertex3f(v.x, v.y, v.z); // 绘制点云 } glEnd(); } }
-
主函数重要函数
在加载模型之前需要对OpenGL需要处理的进行准备,在
main.cpp中有如下重要函数主要函数 备注 void initDisplay()初始化窗口,设置视口、设置背景和模型位置 void init()设置材质和光源的属性 void drawAxis()对于点云可视化时绘制坐标系 void drawUnitCircles()对于点云可视化时绘制三个单位圆 void display()展示 void keyboard键盘事件,同时还有鼠标点击和拖动事件 在准备时使用的
glut库一些函数以及OpenGL里面对于材质环境等的设置函数。在display()函数中,主要对于模型位置、缩放和旋转等进行处理,然后绘制相应的图形,处理相应的模式。代码如下:static void display() { glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); glLoadIdentity(); // 应用模型位置、缩放和旋转 glTranslatef(MODEL_POSITION[0], MODEL_POSITION[1], MODEL_POSITION[2]); glScalef(ZOOM, ZOOM, ZOOM); // 有缩放因子ZOOM进行缩放 glRotatef(ROTATION_ANGLE[0], 0, 1, 0); glRotatef(ROTATION_ANGLE[1], 0, -1, 0); glRotatef(ROTATION_ANGLE[2], 1, 0, 0); glRotatef(ROTATION_ANGLE[3], -1, 0, 0); // Rotate旋转 // 绘制 XYZ 三轴和三个单位圆 if (DISPLAY_AXISCIRCLE) { glDisable(GL_LIGHTING); // 禁用光照,确保颜色正确显示 drawAxis(); drawUnitCircles(); glEnable(GL_LIGHTING); // 重新启用光照 } if (LIGHT_MODE) { // 光照模式 glEnable(GL_LIGHTING); glEnable(GL_LIGHT0); // 打开 } else { glDisable(GL_LIGHTING); glDisable(GL_LIGHT0); // 关闭 } if (DISPLAY_3D_Mesh 1) { objmodel.drawOBJ(WIREFRAME_MODE); } // 绘制mesh图形 else { pcmodel.drawPointCloud(HIGH_LIGHT_FOR_3D_POINT, WIREFRAME_MODE); } // 进行点云 glutSwapBuffers(); // 刷新双缓冲区 }有如下的鼠标键盘事件:
事件 备注 按下 w/a/s/d摄像机分别朝下、左、上、右旋转 按下 q切换线框模式,再按下则返回(针对mesh) 按下 x切换光照模式,再按下则返回(针对点云) 按下 =/-拉近/拉远照相机与图形距离(zoom in/out) 按下 r/g/b将颜色转变为红绿蓝(针对点云) 按下 z切换绘制坐标系和单位圆模型,再按下返回 按下 ESC退出 鼠标按下拖动 可以调整上下左右的视角
三、结果展示
- mesh
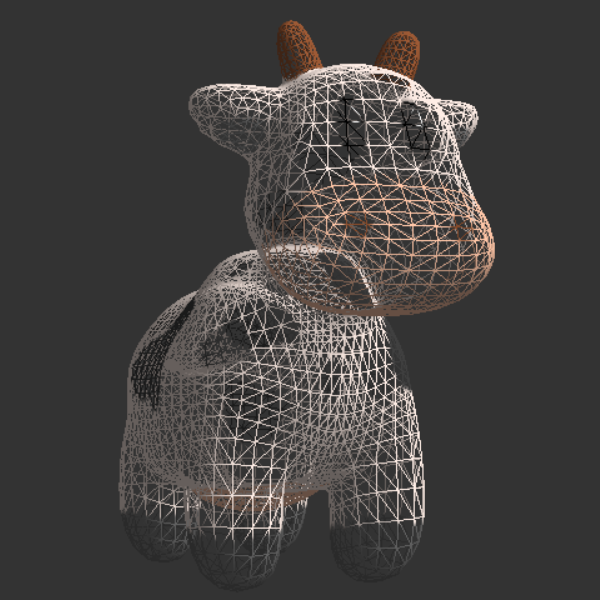
首先是完整的加载以及绘制,得到正面图如下:


取消光照得到如下:


若打开线框模式则有:
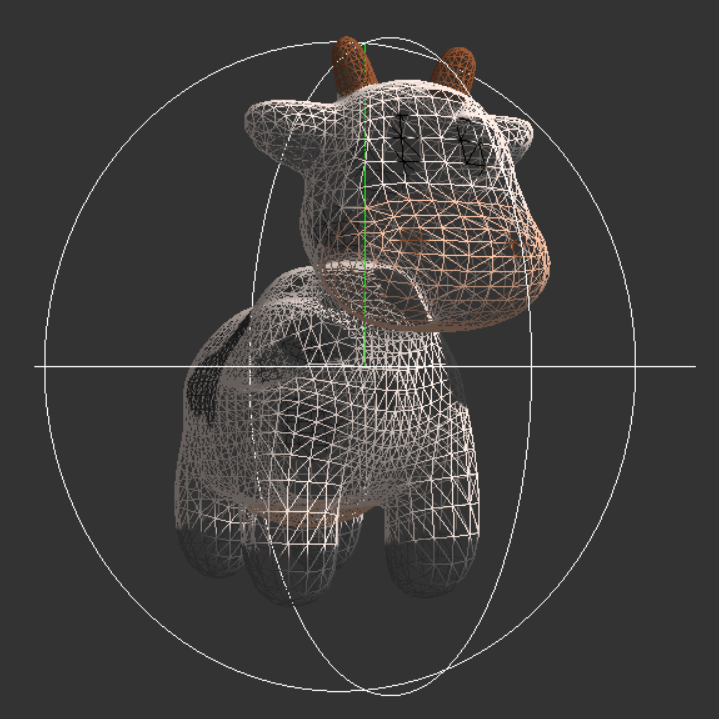
打开坐标系以及单位圆如下:
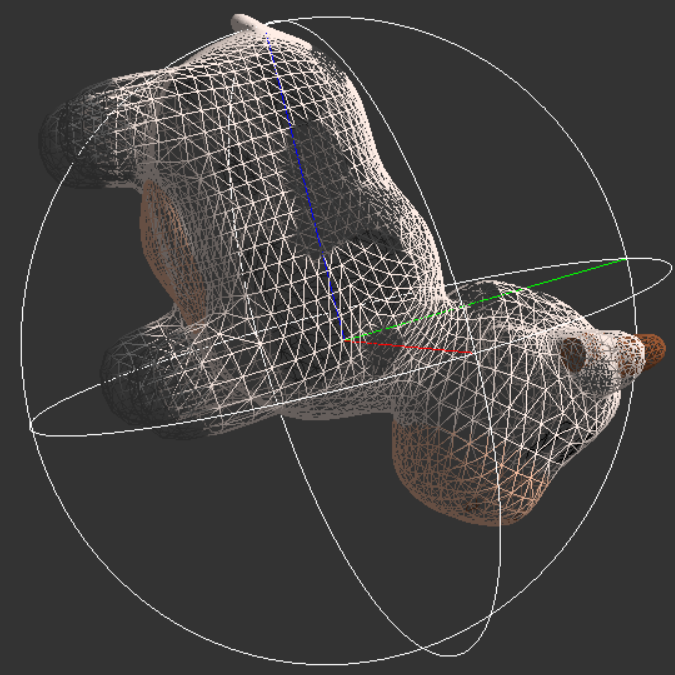
同样也可以通过按键以及鼠标进行调整视角:



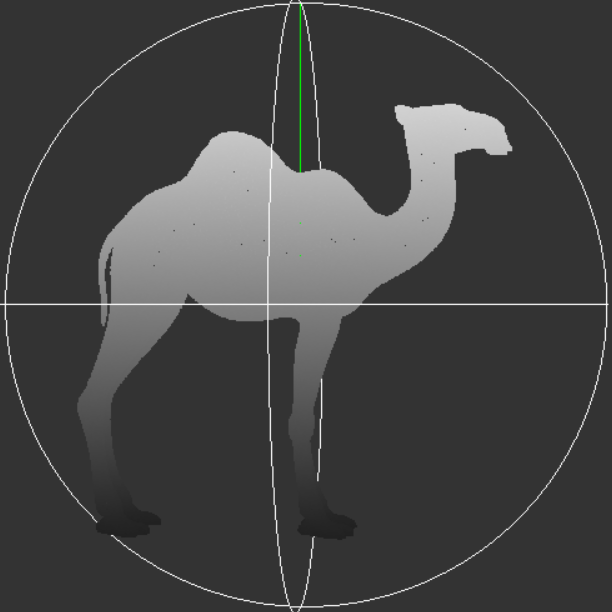
- pointcloud
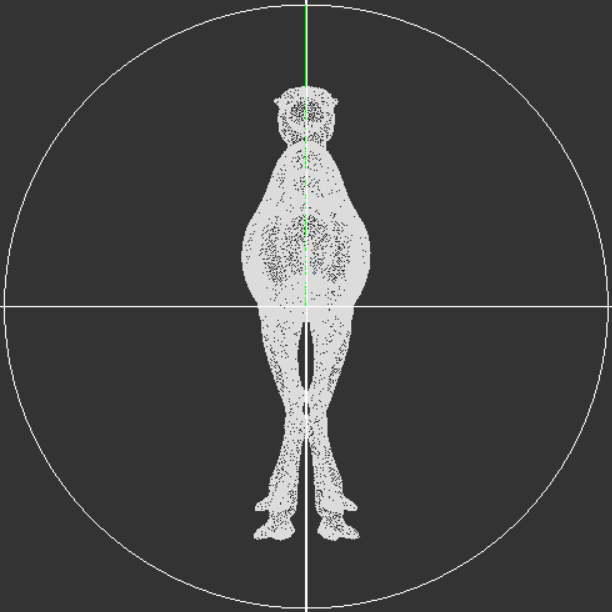
我们将文件路径切换为XYZ_FILE,即可得到下面的图片:
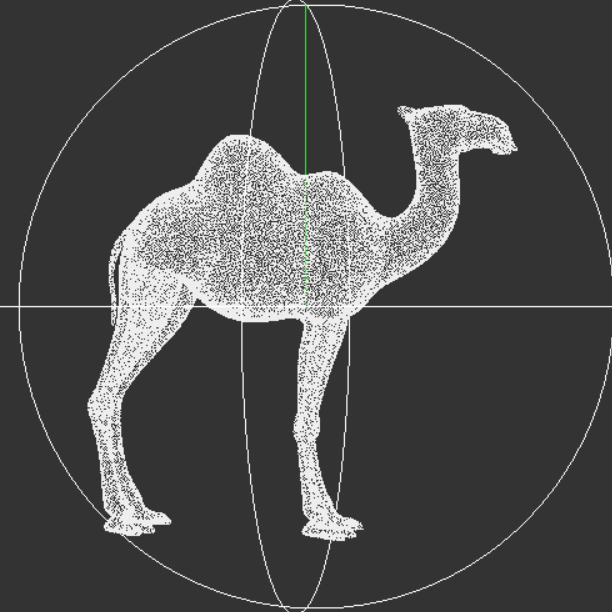
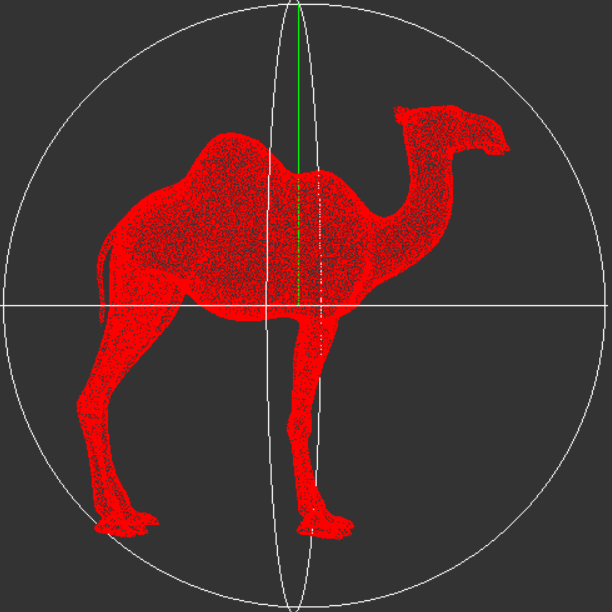
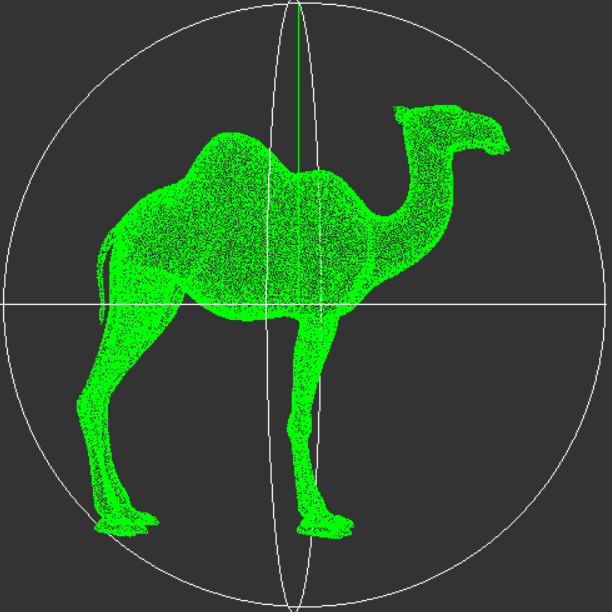
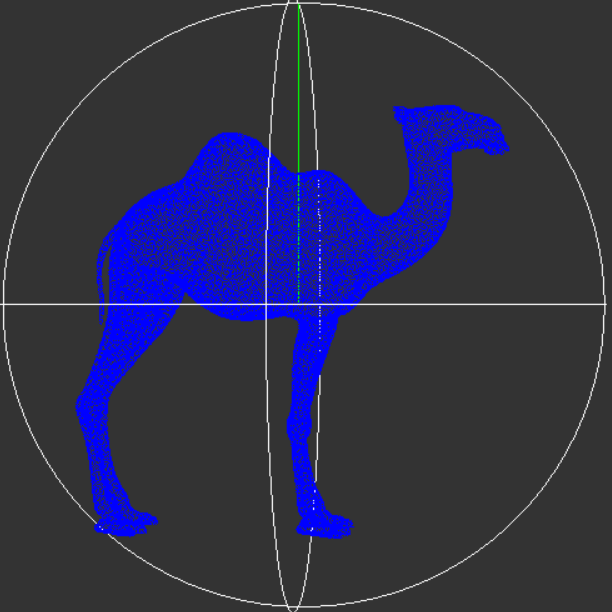
也可以切换其颜色:
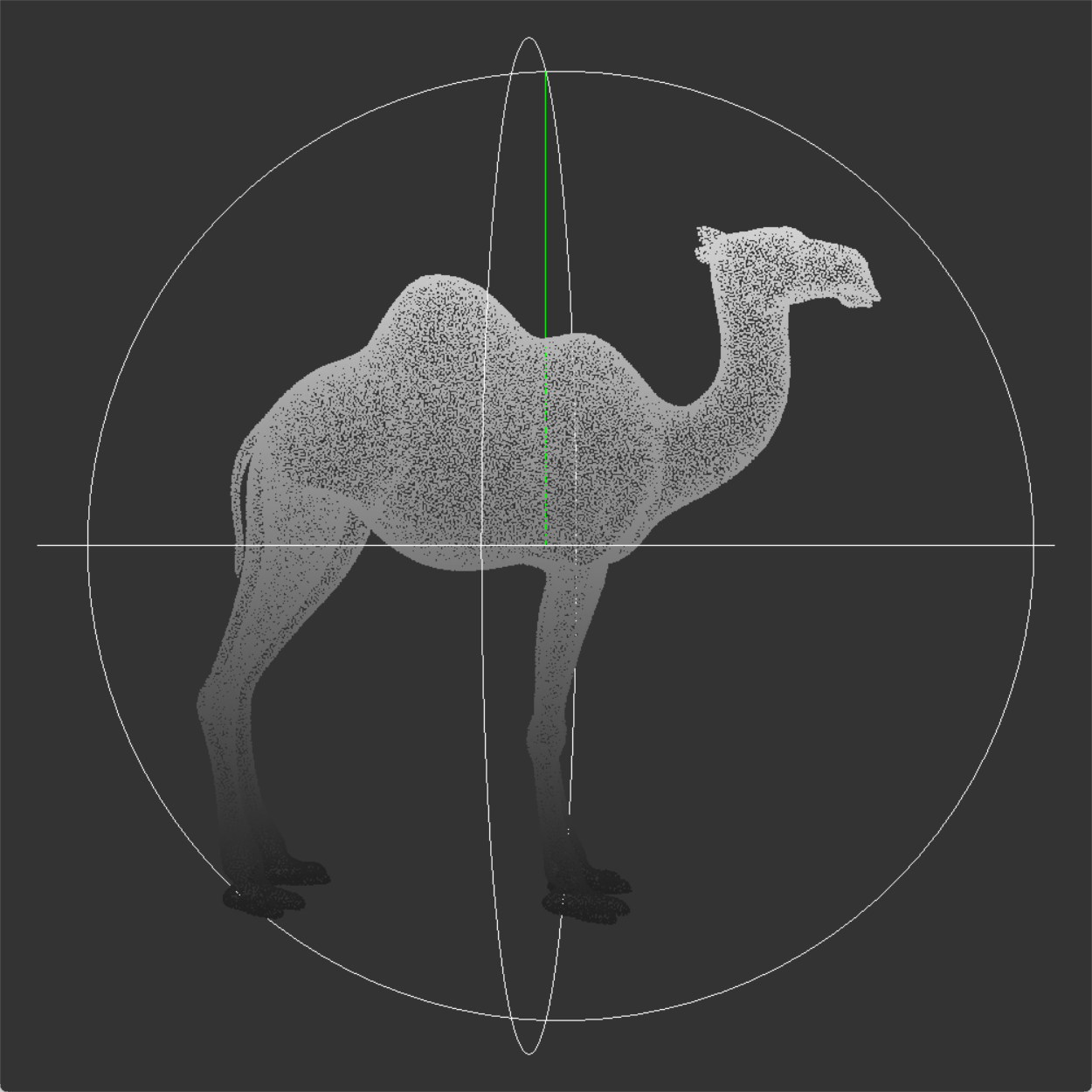
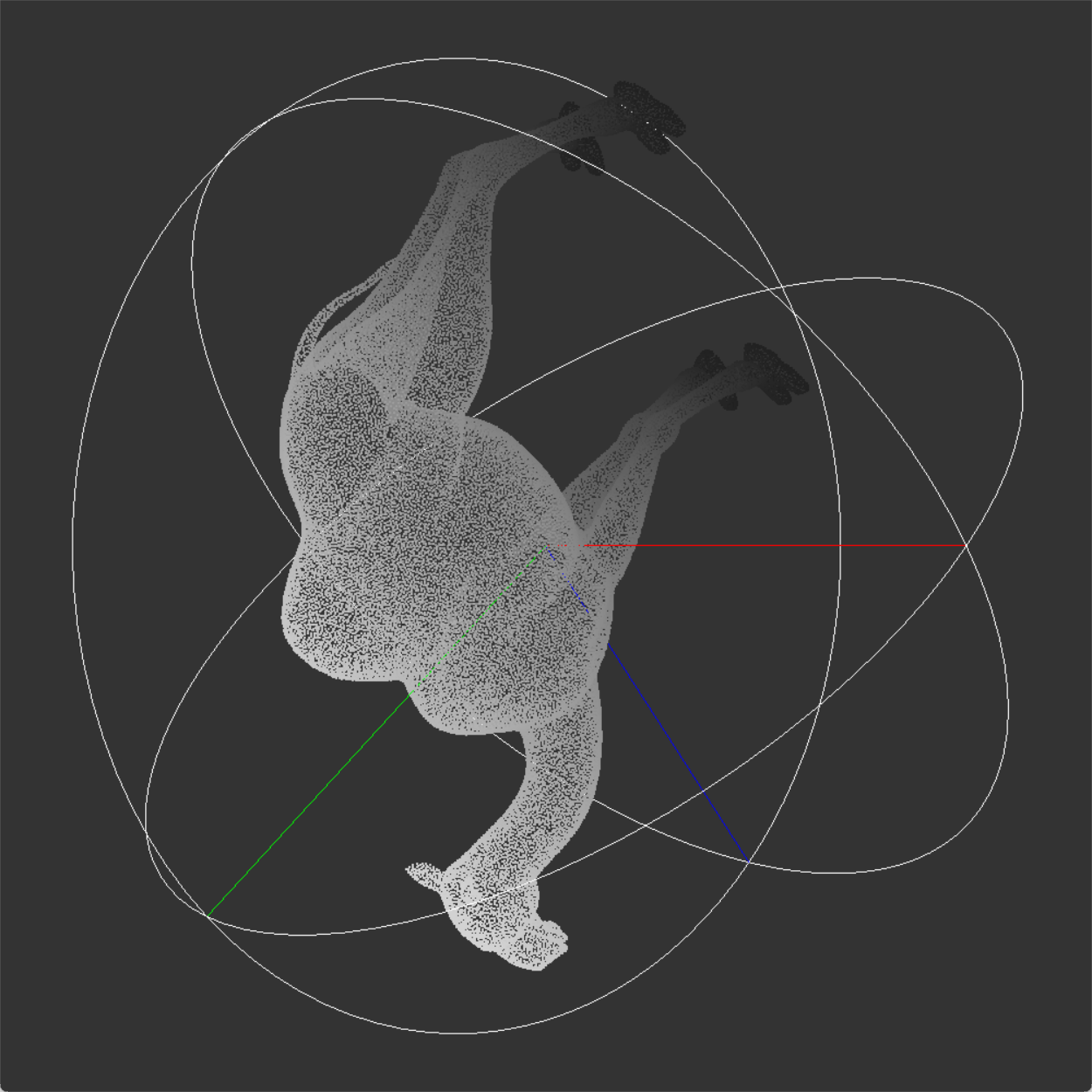
而加入高亮之后则对y进行灰度颜色赋值,得到:
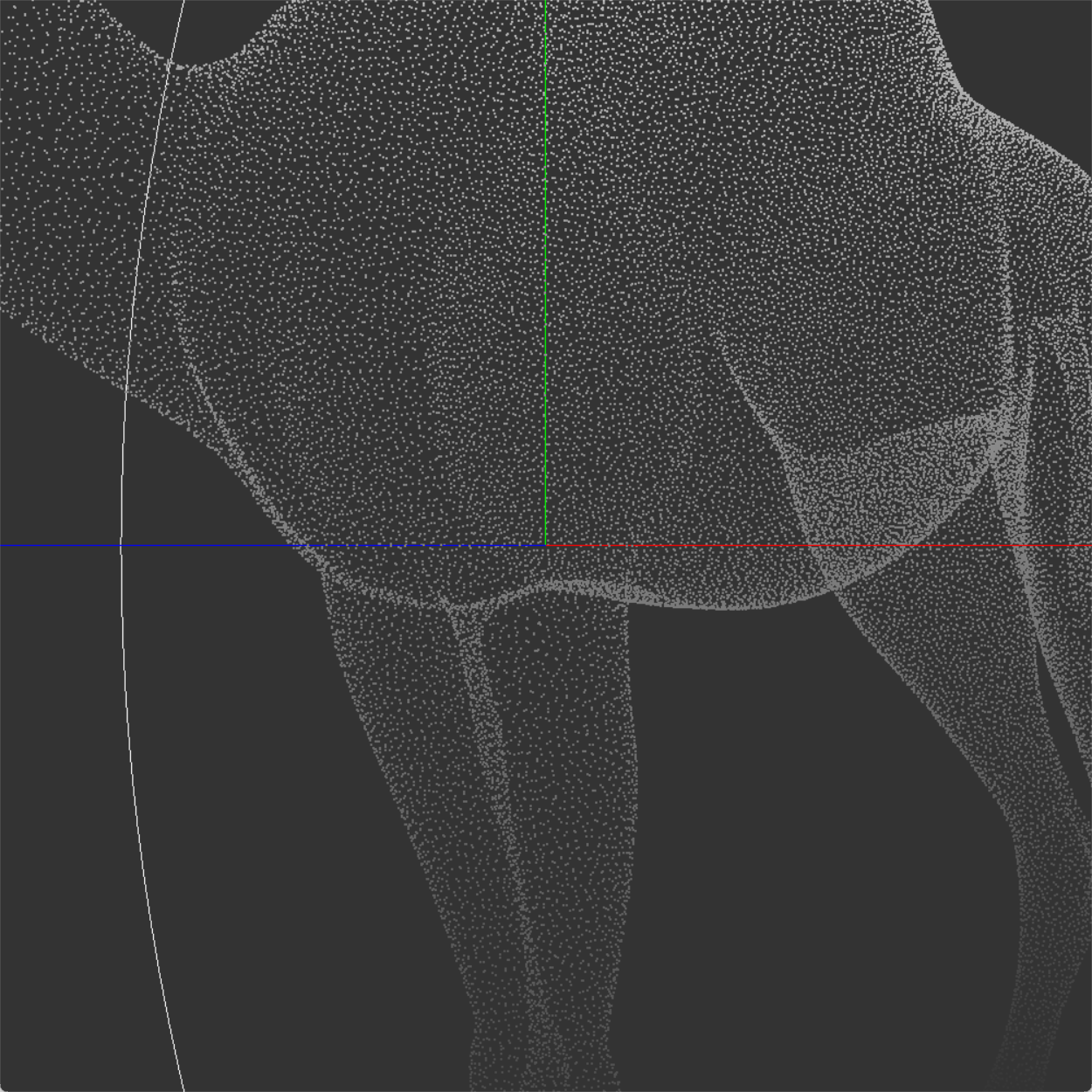
我们按下=进行拉近,可以得到:
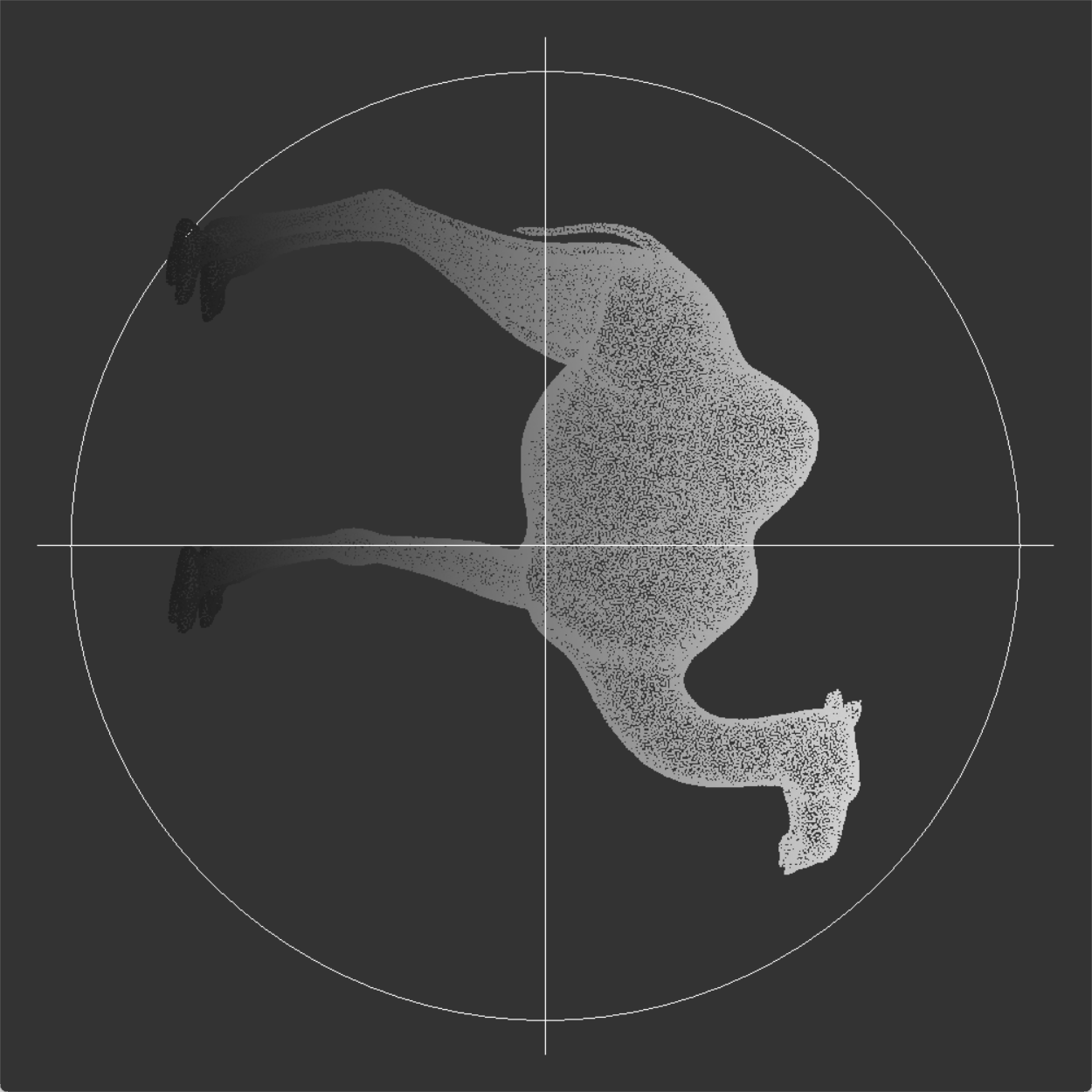
同样可以各种旋转得到:
四、总结
通过本次实验,我对于模型文件有了更深的了解,对于纹理映射以及OpenGL中如何处理这类问题有了深刻的体会。也熟悉了OpenGL中线框模式、着色(shading)以及纹理映射,也实现了一定的交互功能,也完成了基础的三维物体的旋转、缩放和平移操作。
五、视频展示
-
mesh
-
pointcloud