
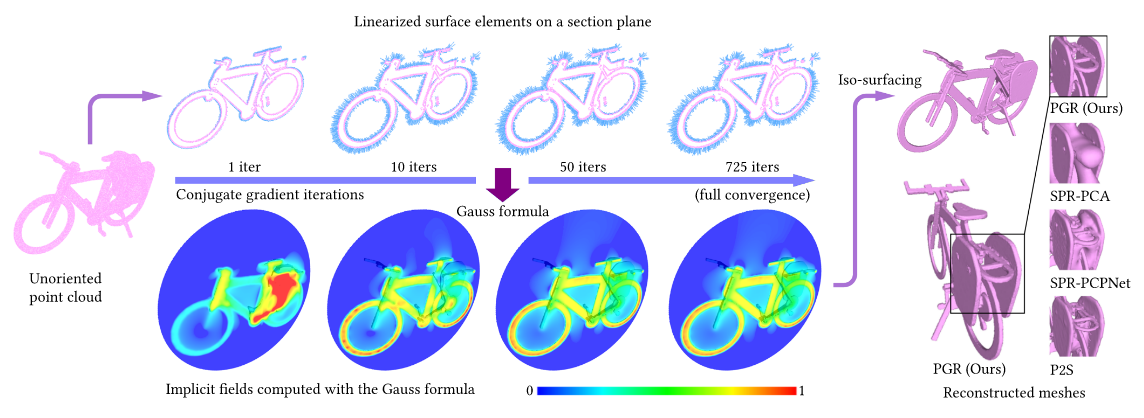
Surface Reconstruction from Point Clouds without Normals by Parametrizing the Gauss Formula
团队主页链接:https://jsnln.github.io/tog2022_pgr/
TOG2022,在Siggraph2023进行展示
-
概括:这篇文章提出了一种基于参数化高斯公式的方法,用于从没有法向量的点云中进行重建。不依赖数据驱动,而是基于高斯公式在势理论(Potential Theory)中的应用。高斯公式描述了一个区域的指示函数如何通过边界积分表示。因此,将表面法向量和表面元素面积视为位置参数,利用高斯公式来求解这些参数,同时获得指示函数。
-
关键词:
表面重建,高斯公式,3D形状建模,基于点的模型,网格模型
1. Introduction
表面重建解决了将点云转化为网格的问题。
本文的贡献:
- 提出参数化高斯重建(PGR)方法,基于高斯方程。
- 引入线性化表面元(LSEs)。
- 采用共轭梯度法。
核心优势:
-
无须预先计算点云法向量,可以处理无定向输入数据
-
通过高斯公式建立参数化模型
-
适用于噪声、稀疏点云、非均匀分布的挑战数据集
至此,我提出来了一些疑问,到时候看完整篇文章再进行提问
📌这篇文章输入和输出是什么?
输入是一个无向点云,输出是一个带有法向量的三角网格(Mesh),并且具有一致的法向量方向
📌这个隐式场是什么?感觉和SDF(有符号距离函数)很像
有点像,但不完全相同
-
隐式场 (Implicit Field) 是一种连续的函数,可以用来定义一个表面(网格)。
-
在重建过程中,它用于判断某个空间点是否在物体表面、内部还是外部。
PGR这里计算的是使用高斯公式计算,类似于指示函数,值接近于1就在表面上,接近于0就在表面外。与SDF不同的点在于SDF计算的有符号距离,正负表示内外,而PGR方法的隐式场在于高斯公式计算出来的指示函数
📌线性化表面元(LSEs)是什么?
(存)
📌高斯公式和指示函数分别是什么?
(存)
2. Related Work
不过多阐述,有:
-
组合方法
-
隐式方法
- 需要输入法向量的参数化方法
- 需要输入法向量的非参数化方法
- 不需要输入法向量的方法
- 基于PCA的法向量估计
- 变分方法:引入额外的平滑能量来正则化隐式场。
- 无符号距离场
- 深度学习
-
相关性分析:与现有方法的关系
PGR(参数化高斯重建)与径向基函数(RBF)方法在某些方面是相似的
- PGR方法同样使用了附加到输入点的基函数,并且也面临类似的问题,如非均匀采样和计算效率
- PGR和Hermite RBF方法都包含向量值的基函数
PGR(参数化高斯重建)与传统的RBF方法相似,但有两点关键不同:
- PGR基函数并非基于插值或光滑性假设,而是受高斯公式启发。
- PGR能够生成一致的法向量方向,确保表面重建的正确性。
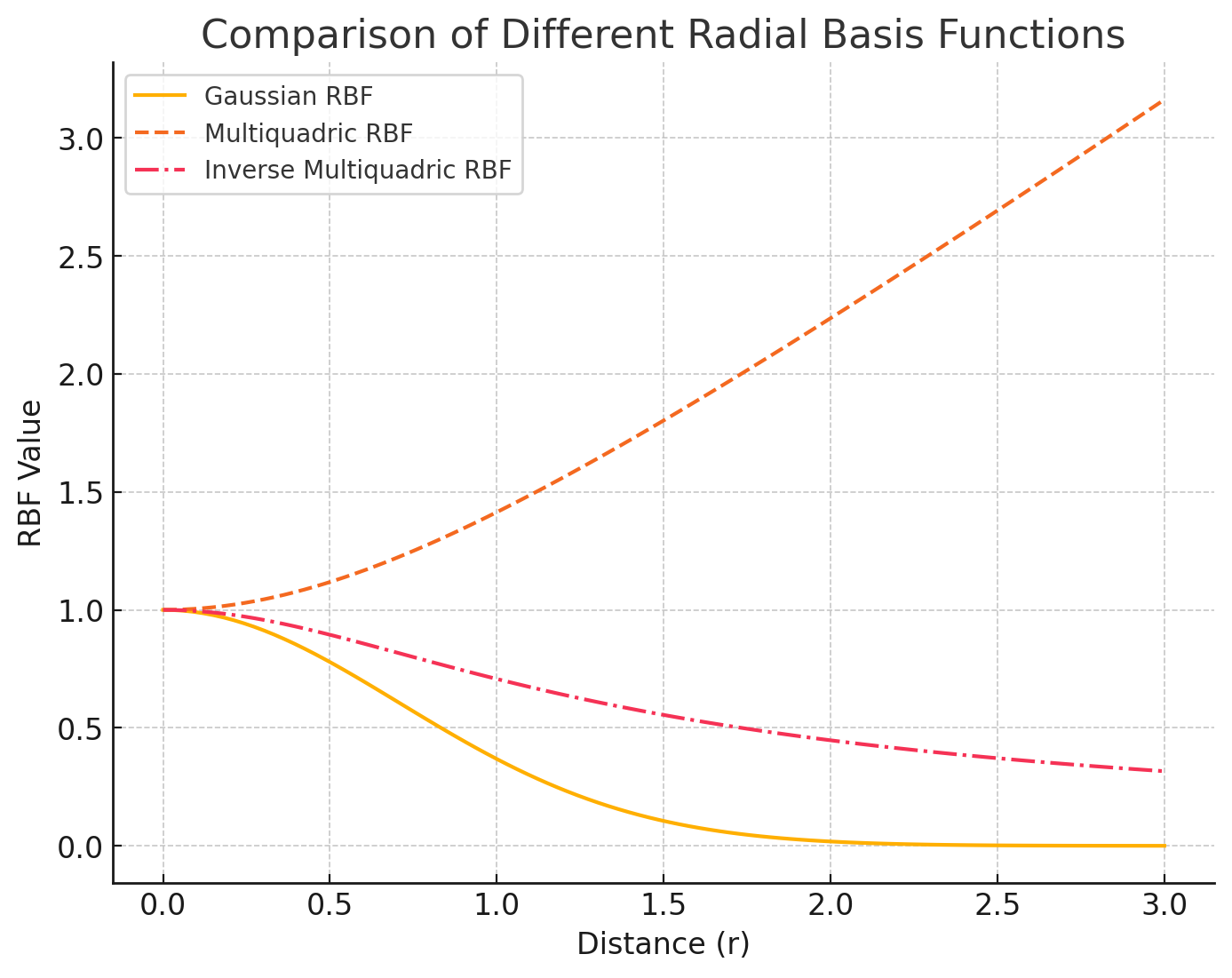
📌思考:RBF(径向基函数,Radial Basis Function)是什么
我理解的RBF本质上就是一耳光关于距离的映射函数,值仅仅依赖于与中心点的欧几里得距离,即
\phi(r)=\phi(\Vert x-x_i\Vert)并且与选择的核有关(核和单调性有关),例如:
- 高斯核
\phi(r)=e^{-\beta r^2}:单调递减- 多二元核
\phi (r)=\sqrt{r^2+\beta^2}:单调递减- 逆多二次核
\phi(r)=\dfrac{1}{\sqrt{r^2+\beta^2}}:单调递减代码:RBF三种核的可视化代码
我们希望使用RBF将离散的点云拟合成连续的表面,给定一组点云
X能够得到一个隐式函数f(x)使得在点云上f(x_i)=0,而内部为负,外部为正假设
f(x)由一组RBF线性函数组成:f(x)=\sum_{i=1}^{N}w_i\phi(\Vert x-x_i\Vert)+P(x)
w_i是系数,P(x)是一个低阶多项式,用于补偿全局趋势拟合过程:
- 求解权重
w_i,使得函数f(x)在已知点云上逼近,即f(x_i)=0- 现在得到了
w_i,那么就可以计算任意位置的x- 提取等值面:Marching Cubes算法https://zhuanlan.zhihu.com/p/639901209
3. PARAMETRIC GAUSS RECONSTRUCTION(PGR)
这里会详细介绍方法和参数高斯重建。首先介绍高斯公式,最后介绍最终指示函数
3.1 Preliminary预备知识
假设\Omega是\mathbb{R}^3的一个开且有界子集,表示一个3D物体,如果知道\part \Omega的完整信息(即表面点和法向量),我们可以仅利用这些信息来表达\Omega的指示函数,of course!
定理3.1 高斯公式
假设 Ω 是 \mathbb{R}^3 中的一个 开且有界区域 (open and bounded region),其边界 \partial \Omega 是光滑的,则:
F(x) = \int_{\partial \Omega} (\nabla \Phi (x - y)) \cdot v(y) \, dS(y)
其中:
-
v(y)是y \in \partial \Omega处的 外法向量 (outward normal vector)。 -
\Phi(x)是 三维拉普拉斯方程 (Laplace Equation) 的基本解。(我的感觉就是个核函数
Φ(x−y)⋅v(y) 计算 每个边界点 y 处的法向信息在 x 处的贡献。
指示函数
指示函数F(x)可以通过高斯函数表示如下:
F(x) =
\begin{cases}
0, & x \in \bar{\Omega}^c \quad \text{(外部,不属于)}\\
1/2, & x \in \partial \Omega \quad \text{(边界)}\\
1, & x \in \Omega\quad \text{(内部,属于)}
\end{cases}
在三维空间3D中,拉普拉斯方程的基本解为:
\Phi(x)=\dfrac{1}{4\pi |x|}
📌思考:我一开始对这里的高斯公式和指示函数有点晕,这个
F(x)到底表示的是什么?其实高斯公式提供了一种基于边界信息重建整个区域的方法,
F(x)是高斯公式的结果,F(x)是通过高斯公式计算出来的。(不恰当的)举例:
现在有一个篮球,我有表面的温度信息,我想知道内部球心的温度
T(x)是多少,我可以通过表面放温度传感器记录局部温度T(y),我可以通过这个来求。这个就是高斯公式的six,只用边界信息来推倒整个区域的信息。高斯公式的本质是一个积分方程
3.2 参数化高斯公式
原始的高斯公式:
F(x) = \int_{\partial \Omega} (\nabla \Phi(x - y)) \cdot v(y) \, dS(y)
当边界上的点集\mathcal{Y}=\{y_j\}_{j=1}^{N_Y}足够密集的时候,积分可以离散化为求和
F(x) \approx \sum_{j=1}^{N_Y} \frac{-(x - y_j)}{4\pi |x - y_j|^3} \cdot v(y_j) \, \sigma(y_j)
这里的v(y)是在y点的单位法线,而\sigma(y)是近似的局部表面积元素。
对于每一个y_j,(\nabla \Phi)(x-y_j)=-(x-y_j)/(4\pi|x-y_j|^3)是一个\mathbb{R}^3到\mathbb{R}^3的向量值径向基函数(RBF)。
\phi_j(x)=(\phi_{j1}(x),\ \phi_{j2}(x),\ \phi_{j3}(x)):=\dfrac{-(x-y_j)}{4\pi |x-y_j|^3}
\phi_j(x)仅由y_j确定,可以认为是基于y_j的径向函数,我们写到
\mu_j=(\mu_{j1},\ \mu_{j2}, \ \mu_{j3}):=v(y_j)\sigma(y_j)
这是y_j处的表面元素的近似值。我们简单称\mu_j为线性化表面元(LSE),而指示函数这时候可以表示为:
F(x) \approx \sum_{j=1}^{N_Y} \phi_j(x) \cdot \mu_j = \sum_{j=1}^{N_Y} \sum_{k=1}^{3} \phi_{jk} (x) \mu_{jk}
这说明高斯公式可以被看作是一个基函数的线性组合,未知系数是\mu_j
为什么是三个维度?
因为这是一个三维的向量(\mu_j等),每一个维度表示一个方向,例如\mu_j=(\mu_{j1},\mu_{j2},\mu_{j3})分别对应x,y,z三个方向,例如此时法向量指向外侧为(0,0,1)和表面积元素为\sigma(y_j)=0.1,那么此时的\mu_j=(0,0,0.1)
表面元就好像积分
\int_{\partial \Omega} f(y)dA里面的dA,但是我们是数值计算,无法操作连续的积分,所以要用离散的点来近似计算,用有线个点来近似连续的表面积积分
对于上面的式子,原来的表面积分变成了一个离散的权重求和问题,即:
F(x) \approx \sum_{j=1}^{N_Y} \phi_j(x) \cdot \mu_j
这里\phi_j(x)是向量基函数,描述了y_j对x的影响
为了求解\mu_j我们选取了一个新的点集\mathcal{X}=\{x_i\}_{i=1}^{N_X},也是位于表面上的一组点,从方程1和方程7可以得到以下线性约束:
\sum_{j=1}^{N_y} \sum_{k=1}^{3} \phi_{jk}(x_i) \mu_{jk} = \frac{1}{2}, \quad i = 1, \dots, N_X
这里已知的是:\phi_{jk}(x_i) \mu_{jk},由高斯公式确定,由\phi_j(x)=(\phi_{j1}(x),\ \phi_{j2}(x),\ \phi_{j3}(x)):=\dfrac{-(x-y_j)}{4\pi |x-y_j|^3}得到
未知变量是\mu_{jk}
为了方便求解,我们可以写成矩阵形式
A\mu=b
当然这里的b:=(1/2,...,1/2)^T
我的理解,再回头看公式:
\begin{aligned} F(x) &= \int_{\partial \Omega} (\nabla \Phi(x - y)) \cdot v(y) \, dS(y)\\ &\approx \sum_{j=1}^{N_Y} \textcolor{red}{\frac{-(x - y_j)}{4\pi |x - y_j|^3}} \cdot \textcolor{blue}{v(y_j) \, \sigma(y_j)}\\ &=\sum_{j=1}^{N_Y}\textcolor{red}{\phi_j(x)\cdot\textcolor{blue}{\mu_j}}\\ &=\sum_{j=1}^{N_Y}\textcolor{green}{\sum_{k=1}^{3}}\phi_{jk}(x)\mu_{jk} \end{aligned}这些都是三维的,所以需要求和,再理解一下就是因为
\mathbb{R}^3进行点乘那么就是一个标量
接下来就是如何求解的问题了,太复杂了,我先不看了。在这一节的末尾也提出来了一些求解的困难。3.3中介绍了方程9的重新制定。
3.3 Recovering the Indicator Function and Object Surface
一句话解释如何求解
\mu通过求解正则化线性系统
B \xi = b计算得出,其中B = AA^T + R_0,并且\mu = A^T \xi。