
这里总结科研中点云的任务,目的是在总结并且自己可以快速回顾
统计流形
| 名称 | 会议/期刊 | 级别 | 备注 |
|---|---|---|---|
| A Statistical Manifold Framework for Point Cloud Data | ICML2022 | CCF-A | 统计流形 |
| Information Geometric Framework for Comparing Point Clouds | - | - | 统计流形 |
| PointGMM:a Neural GMM Network for Point Clouds | CVPR2020 | CCF-A | GMM和hGMM |
1. A Statistical Manifold Framework for Point Cloud Data
论文总结链接:https://carrynotkarry.com/research/a-statistical-manifold-framework-for-point-cloud-data/
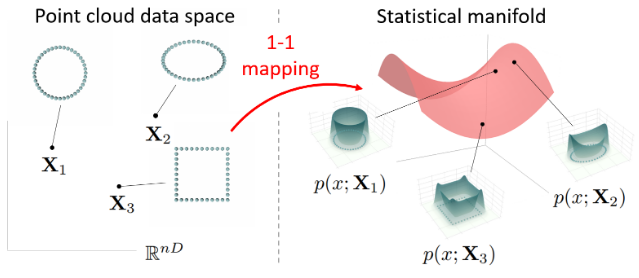
2. Information Geometric Framework for Comparing Point Clouds
翻译:用于比较点云的信息几何框架(20240508于arXiv)
论文总结链接:https://carrynotkarry.com/research/information-geometric-framework-for-comparing-point-clouds/
这里有了许多概念的思考以及可视化的图,很适合初学的查看。请结合这两篇论文进行分学习
3. PointGMM:a Neural GMM Network for Point Clouds
论文链接:PDF链接
论文总结链接:【论文阅读】PointGMM:a Neural GMM Network for Point Clouds
创新点:分层高斯混合模型(hGMM),深度学习、潜在空间、刚性配准、语义分割

点云降噪
| 名称 | 会议/期刊 | 级别 | 备注 |
|---|---|---|---|
| PD-Flow: A Point Cloud Denoising Framework with Normalizing Flows | ECCV2022 | CCF-B | 比较早,但是毛爱华后出了很强的文章 |
| Denoising Point Clouds in Latent Space via Graph Convolution and Invertible Neural Network | CVPR2024 | CCF-A | 毛爱华这篇强的没边 |
| IterativePFN: True Iterative Point Cloud Filtering | CVPR2023 | CCF-A | 迭代,如何学习特征 |
| PCDNF: Revisiting Learning-based Point Cloud Denoising via Joint Normal Filtering | TVCG2024 | CCF-A | 形状感知选择器,依靠法线(不佳) |
| PathNet: Path-Selective Point Cloud Denoising | TPAMI2024 | CCF-A | 结合强化学习进行路径选择 |
| StraightPCF: Straight Point Cloud Filtering | CVPR2024 | CCF-A | 迭代PFN进阶版本,线性插值而不是高斯接近 |
1. PD-Flow: A Point Cloud Denoising Framework with Normalizing Flows
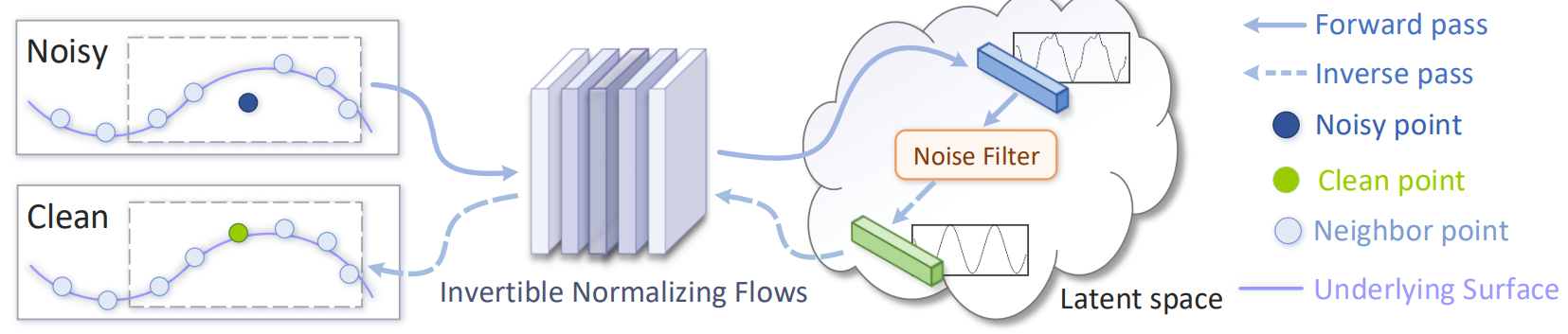
这篇没有写专门的文章,但是也了解了不少,稍微总结一下。
主要特别的点有如下:
- 噪声和干净点云一起进入到潜在空间(latent space)在这里进行正则化model学习真实分布,消除噪声,再返回至原来的欧式空间达到效果result
- flow主要作用是一个可逆的双射,将复杂的情况到一个简单的情况进行处理
- 这里的Augment其实就是扩充维度,例如和IterativePFN里面一样,让其自由度更高(这里用KNN邻域特征)
- 这里有一个det作用,让其在变换后也恢复至真实情况,需要对体积进行加减(还需要多看一下,但好像不难)
- 原始点云到潜在空间是一个连续的变换,共享参数,类似于
\text{pc}\xrightarrow{f_1}\xrightarrow{f_2}\xrightarrow{\cdots}\text{latent space},类似于复合函数f(g(h(x)))即f\circ g\circ h- 这里面有三种方法来消除噪声,三者互斥,目标都是从
\tilde{z}到latent space的\hat{z}分别是
- FBM(fixed):保留前
D_p=3维度- LBM(learnable):学mask,学习哪些维度是noise
- LCC:学习变换矩阵
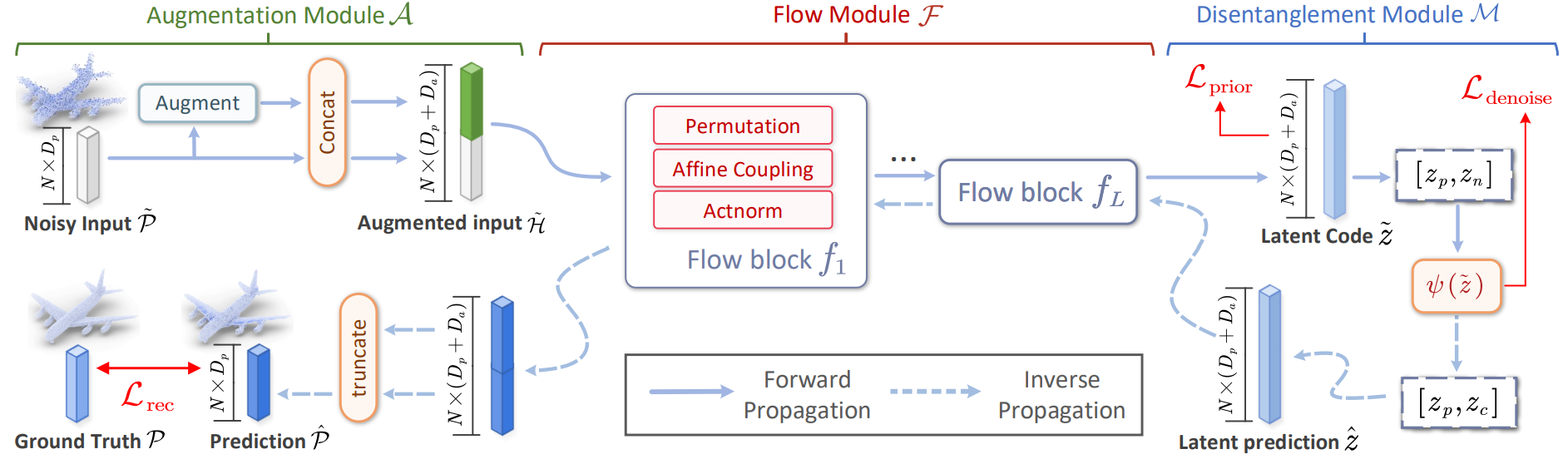
2. Denoising Point Clouds in Latent Space via Graph Convolution and Invertible Neural Network
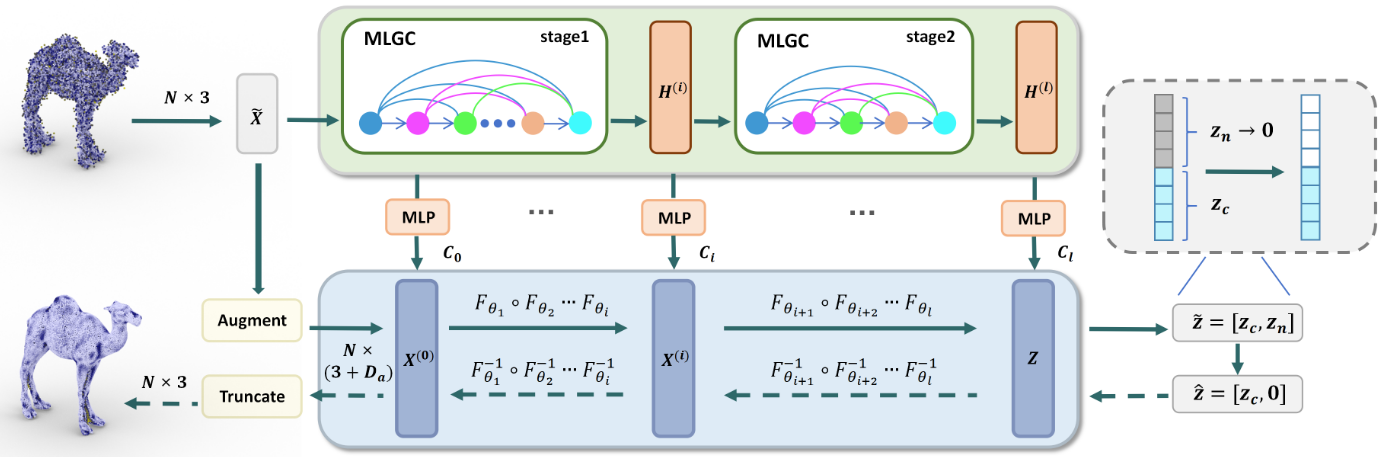
这篇还没有仔细看,但是好像是在前一篇进行改进的,从这个架构图也可以看出
3. IterativePFN: True Iterative Point Cloud Filtering
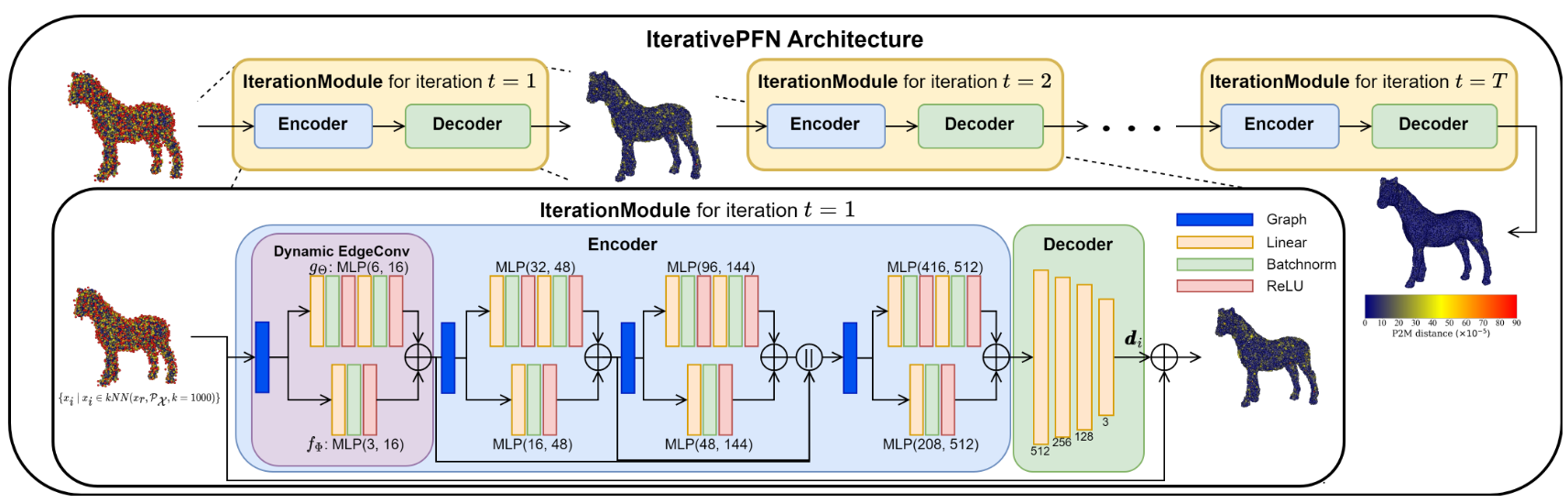
这篇很熟悉了,是毕设的相关文章
主要的点都可以从这个架构图得出
- 迭代进行,并且使用动态边卷积学习特征,让其特征逐步学习到512维,最后使用解码器进行降至3维就是最后的推断的位移
- 主要特别的点我觉得是在如何学习邻域特征吧,并且将其分成patch进行学习
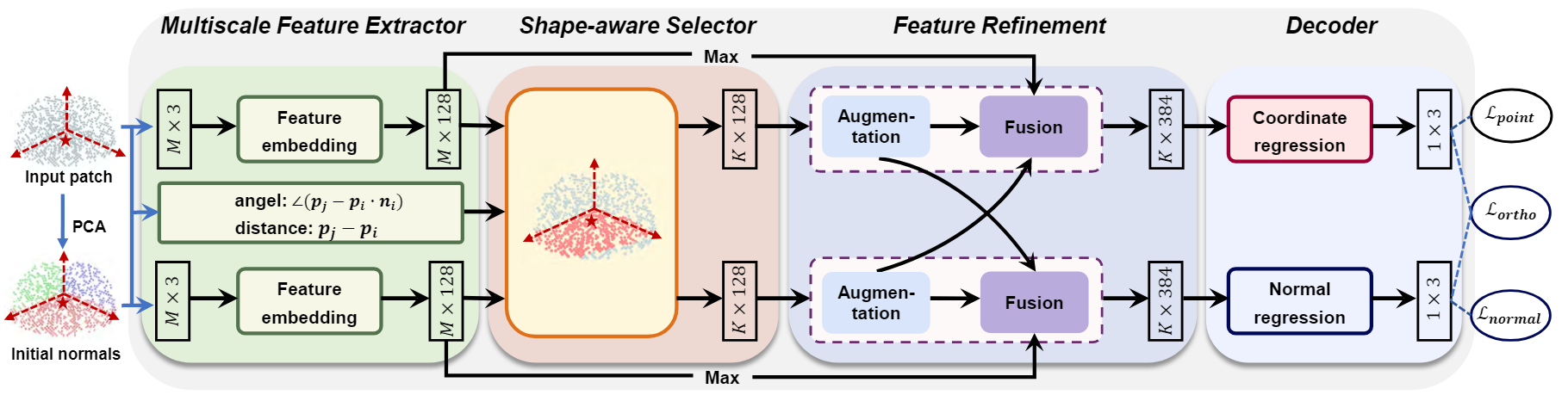
4. PCDNF: Revisiting Learning-based Point Cloud Denoising via Joint Normal Filtering
论文链接:https://arxiv.org/abs/2209.00798
和IterativePFN相似点都是用的“编码器译码器”的结构,这里划分成了四个重要部分
- 多尺度特征提取器:不仅结合了点(
N\times 3)和法线(N\times 3),这里还结合了角度(N\times 1)和距离(N\times 1),然后进行特征提取,能够结合角度和距离确实很不错是一种思路,但是效果好不好就不知道了 - 形状感知选择器:这一部分应该是一个主要创新点,大概就是我选择每个点
x附近64个点进行处理,然后通过MLP+池化,最后选择得分高的32个,选取其原来的特征进行拼接。这就好像要选出32个人,那么我先让64个人进行训练,选择优秀的32个出来 - 特征细化:增强特征保持
- 解码器:点和法线进行回归
我觉得主要的创新就在这个形状感知选择器吧,加上如何特征保持。但是很容易理解法线在高噪声的时候是不好的,因为有高噪声之后本来就乱,再结合这时候乱的法线就不佳了
idea:如何不依赖法线进行选择
5. PathNet: Path-Selective Point Cloud Denoising
论文总结链接:https://carrynotkarry.com/research/pathnet-path-selective-point-cloud-denoising/
路径选择,低噪声那么就少进入迭代块,高噪声那么就选择多的迭代块(用强化学习进行训练)
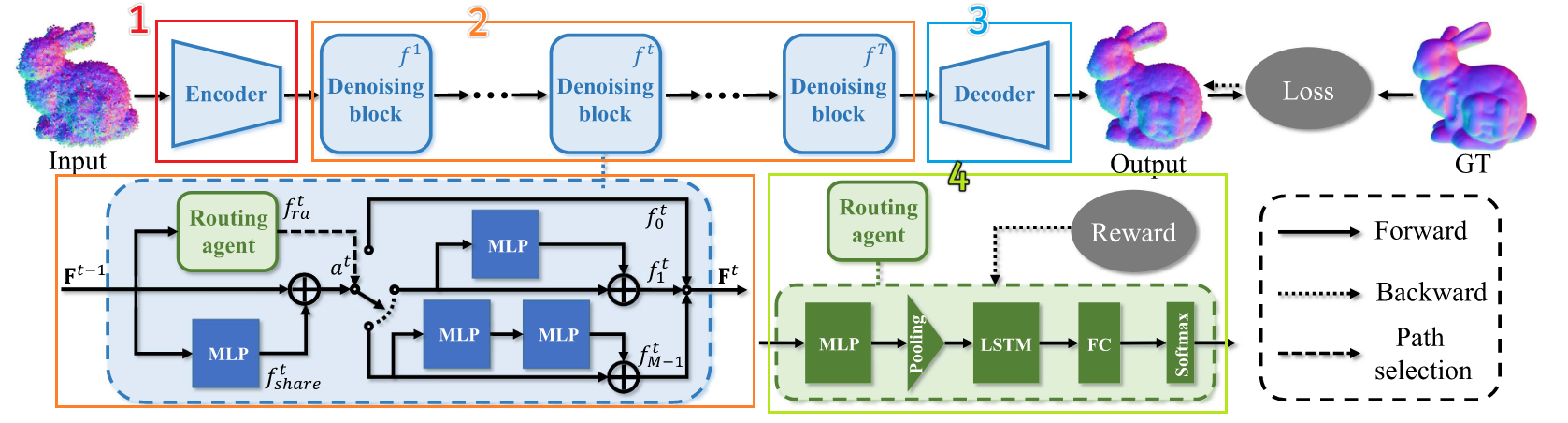
分成四个部分,分别是Encoder编码器、Denoising Block去噪模块、Decoder解码器、Routing Agent路由选择器(绿色)
主要创新点在于第一次结合强化学习,进行路径选择
6. StraightPCF: Straight Point Cloud Filtering
论文总结:https://carrynotkarry.com/research/straightpcf-straight-point-cloud-filtering/
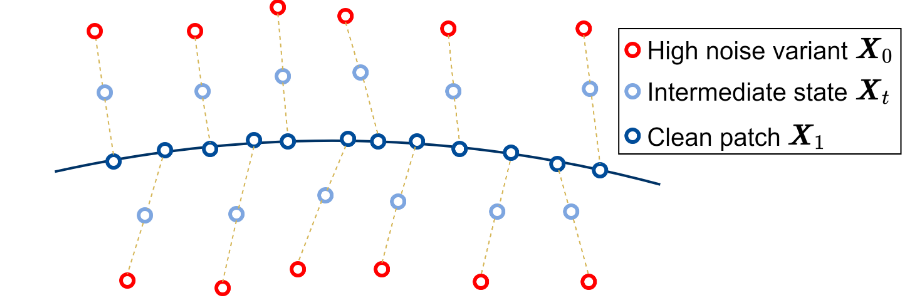
和IterativePFN是同一作者,这里并不是使用迭代PFN的逐步接近“GT+噪声”,而是直接线性插值,省去了很多参数以及时间并且表现更佳。拥有两个模块:
- VelocityModule:给点分配一个方向,尽量往GT上走直线
- DistanceModule:动态调整,确保收敛刚好("离得远时大步走,近了就小步走")
表面重建
| 名称 | 会议/期刊 | 级别 | 备注 |
|---|---|---|---|
| Surface Reconstruction from Point Clouds without Normals by Parametrizing the Gauss Formula(PGR) | TOG2022 | CCF-A | PGR |
1. Surface Reconstruction from Point Clouds without Normals by Parametrizing the Gauss Formula(PGR)
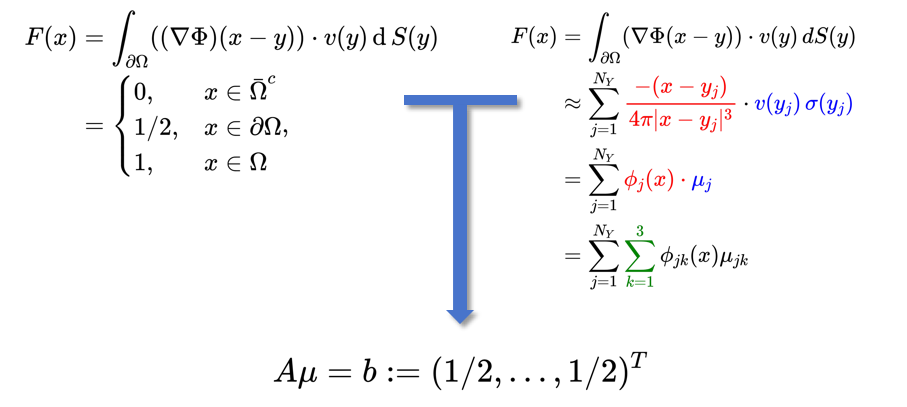
本文主要讲了基于参数化高斯公式的方法,从没有法向量的点云中进行重建。
主要使用高斯方程来计算指示函数,利用在边界为
\frac{1}{2}这个约束进行求解(矩阵)方程,通过学习的方法求解参数,也就是法线,最后得到法线一致的表面。
https://jsnln.github.io/tog2022_pgr/
Tag:高斯公式、表面重建、指示函数、迭代进行优化
3DGS
| 名称 | 会议/期刊 | 级别 | 备注 |
|---|---|---|---|
| Deformable Radial Kernel Splatting | CVPR2025 | CCF-A | 用可变性径向核函数来学习 |
| Scaffold-GS: Structured 3D Gaussians for View-Adaptive | CVPR2024 | CCF-A | 体素化,对于每个体素有一个锚点,有若干个高斯核学习 |
1. Deformable Radial Kernel Splatting
论文总结链接:Deformable Radial Kernel Splatting(与Scaffold-GS写一起了)
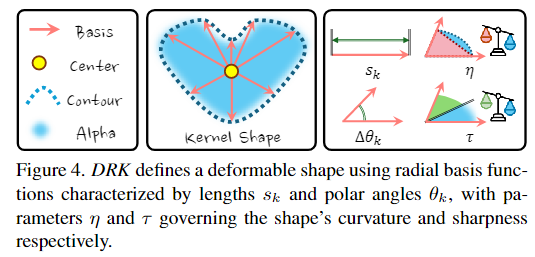
传统高斯是径向对称和平滑的,DRK(可变性径向核)可以进行学习,更加灵活、通用。可以更好地拟合不同性质的原语(边、角、曲线等),并且能精细控制边缘的清晰度与边界曲率
DRK的核具有平面特性,它们不一定3D对称而可以近似为扁平或2D形态的核,用少数核来表示,而3DGS需要用很多
用一个DRK(可变性径向核)进行学习,具有很强的泛化能力,针对各种情况,参数也少
2. Scaffold-GS: Structured 3D Gaussians for View-Adaptive
论文总结链接:Scaffold-GS: Structured 3D Gaussians for View-Adaptive(与DRK写一起了)
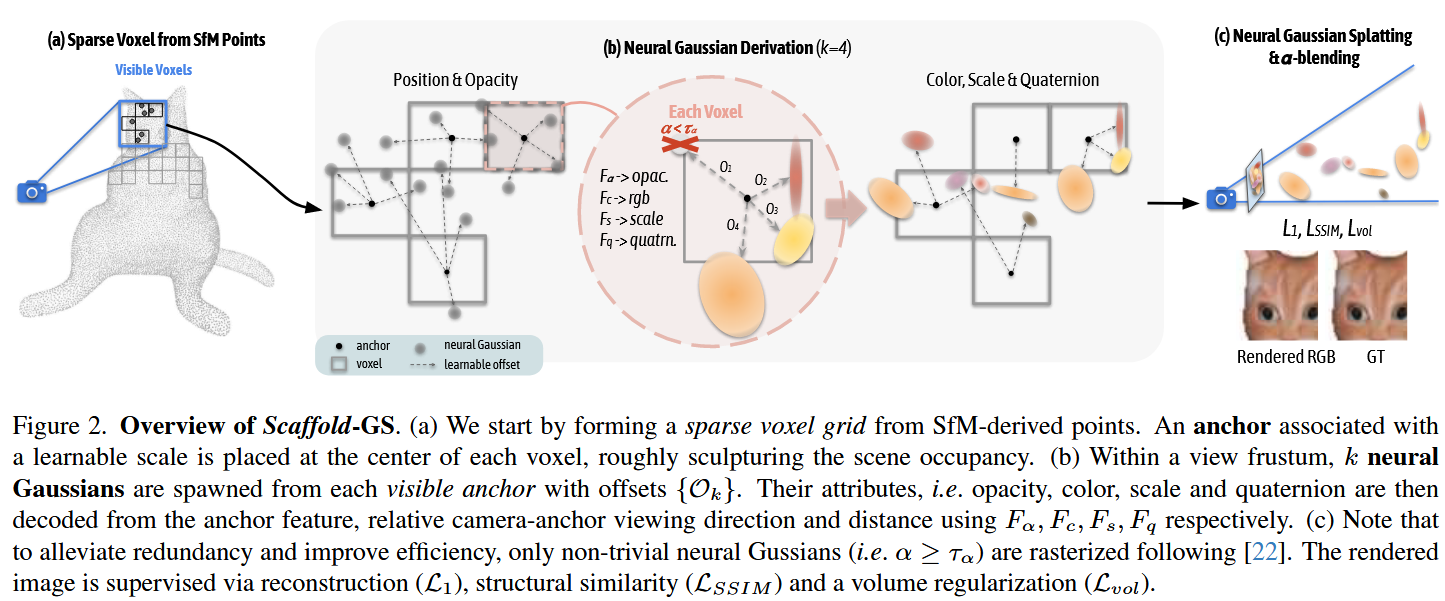
同样是与3DGS比较,这里展示了创新点主要在于
Scaffold-GS=结构化高斯建模 + 按需动态推理
核心的有:
- Anchor Points(锚点):少量“锚点”来表示场景结构,作为高斯的中心依据
- 局部高斯分布:每个锚点可以在其局部区域内生成多个高斯
还有其他就是CV视角等方面了,动态推理每个高斯的大小、形状、透明度等属性
也可以自动裁剪不需要的锚点(压缩表示)
可以把Scaffold-GS看作:
从点云 → 到结构驱动表示 → 再到视角动态推理的一步
更关注结构组织性(scaffold)和渲染适应性(adaptive),而DRK更像是在单个原语层面做了极致的表达优化
其他方面
| 名称 | 会议/期刊 | 级别 | 备注 |
|---|---|---|---|
| PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation | CVPR2017 | CCF-A | 分类;分割 |
| PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space | NIPS2017 | CCF-A | 进阶版 |
1. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
我的博客链接:PointNet&PointNet++
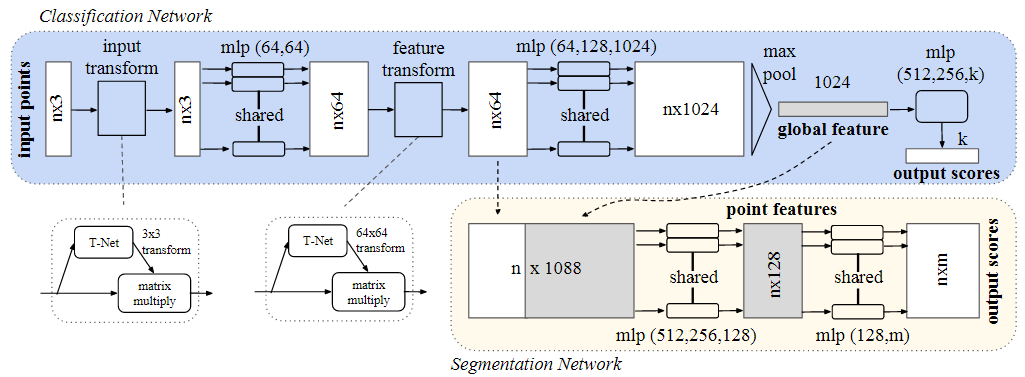
点云深度学习的开山鼻祖,比较基础也很容易理解,主要解决了无序性
2. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
我的博客链接:PointNet&PointNet++
2017年发表在NIPS上的文章,同一个作者,也是八年前的文章了还是比较基础的,这里主要解决了如何学习局部特征以及层次化采样(我理解的就是逐步,见图即可)

主要看左边这个图,它实现了逐渐将邻域的特征结合起来,并且逐步扩大(可以看见圈越来越大)
点云上采样
1. Learning Continuous Implicit Field with Local Distance Indicator for Arbitrary-Scale Point Cloud Upsampling
来自AAAI2024的论文,论文解读🔗:https://carrynotkarry.com/paper-reading/apu-ldi/
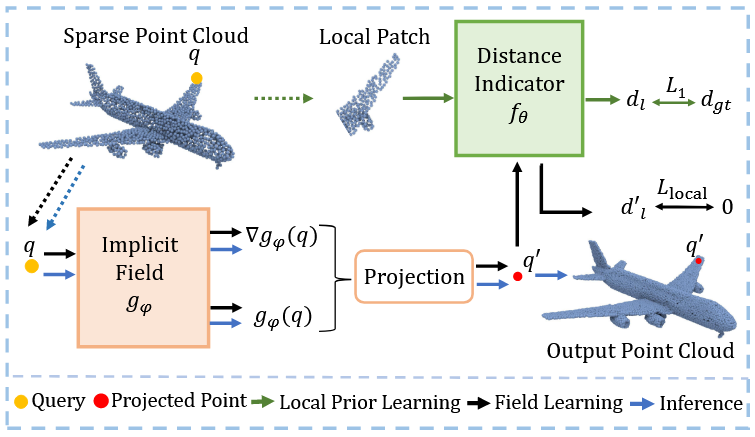
这里讲到了如何分局部进行学习表面,使用预训练好的LDI进行指导整个场的学习,是一篇不错的文章,这篇作者也已经有4篇A以及一个在投,做的是隐式场的,值得一看
2. SPU-IMR: Self-supervised Arbitrary-scale Point Cloud Upsampling via Iterative Mask-recovery Network
这是一种自监督的方法
论文解读🔗:https://carrynotkarry.com/paper-reading/spu-imr/
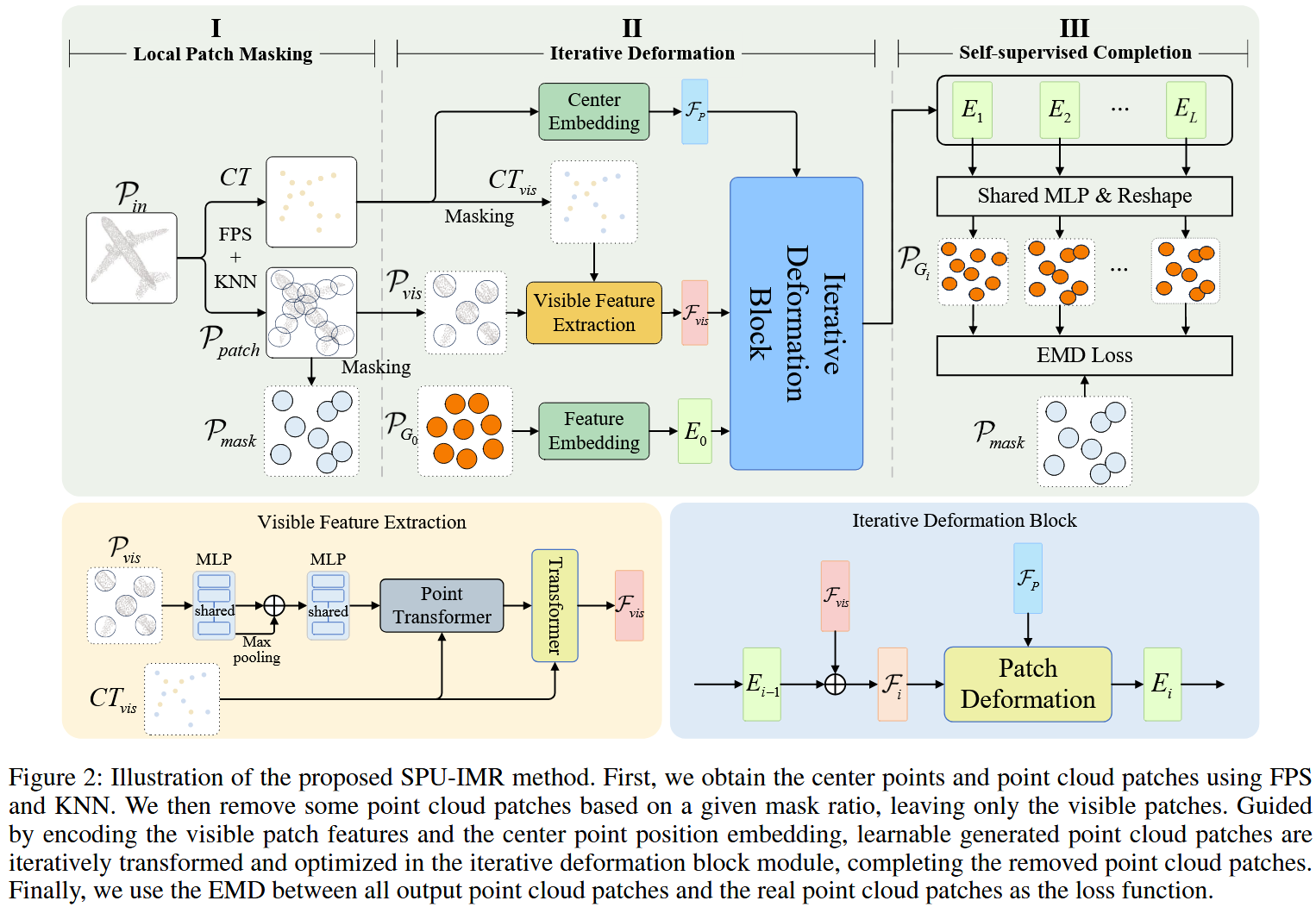
这篇一张图解决了所有,将若干个patch分成可见vis和不可见(掩码)mask的patch,当然这并不是固定的,而是很多的掩码序列,每个patch都会进行掩码操作。然后每次通过可见的vis学习mask应该是什么样的,最后将学习到的很多的点云共同进行拼接,然后进行FPS采样。我觉得类似于数据集的划分,轮流当测试集。