
StraightPCF: Straight Point Cloud Filtering
3. Motivation
这里主要讲到了ScoreDenoise和IterativePFN的方法和区别,这里值得一提的是迭代PFN是给GT逐步增加噪声让噪声点云逐步接近的,但是StraightPCF则是直接一步到位,走直线+控制速度
这篇文章的作者是Dasith de Silva Edirimuni,就是迭代PFN的作者,这里进行进一步的改进
4. Method
4.1 Filtering via straight flows
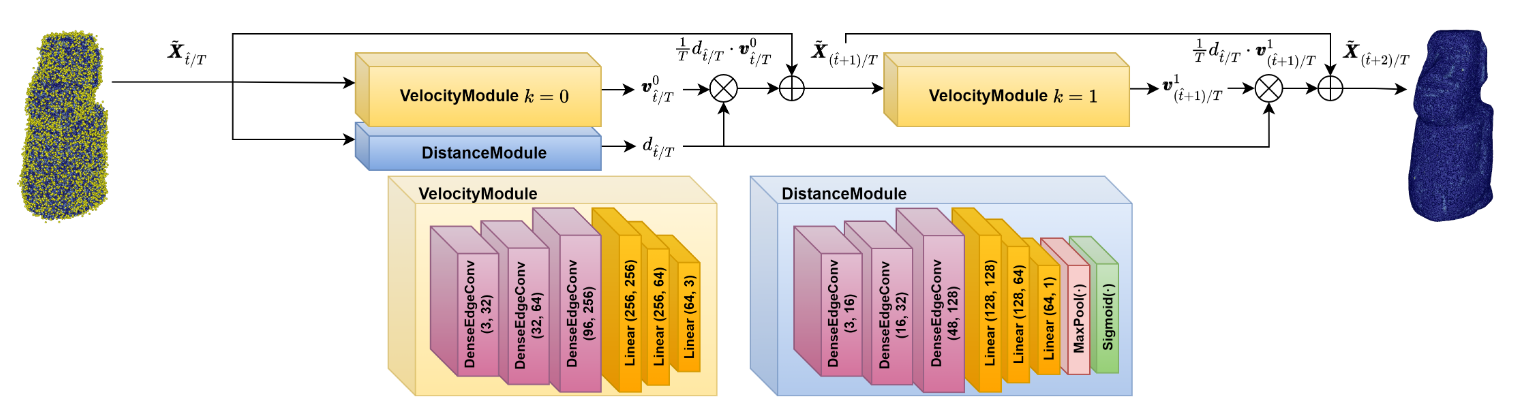
- VelocityModule → 给每个 noisy 点分配一个恒定速度方向,往干净表面走,路径尽量直线化;
- DistanceModule → 让点走到靠近表面时别冲过头(overshoot),根据剩余距离动态调整速度,确保最终收敛得刚好。
对于[M/N,1] 会走N-M,完整的位置更新为\tilde{X_1}=\tilde{X}_{M/N}+\dfrac{1}{N}\sum_{\hat{t}=M}^{N-1}\nu_\theta(\tilde{X}_{\hat{t}/N})
但也有一定问题,t=M/N是未知的,并且好像也不一定直
4.2 Straight flows via VelocityModule coupling
既然是线性插值为什么还说不会一定直?
因为我们用的神经网络去推动前进的,可能会导致一定的弯曲,例如A朝右上、B朝正右、C朝右下,那么A->B->C就会是一个曲线
对于(10)式,我们有两个训练目标来,前者是让其每段速度尽量和整体方向一致,后者是让轨迹贴着真实轨迹走
4.3 Distance estimation to the clean surface
之前的Coupling VM已经往正确方向进行,但是推的力度可能不够,可能还没有完全推倒干净表面上(会影响精度)所以加了距离预测模块——DistanceModule。鼓励去预测一个相对距离
这是一个标量,形式就是公式(13),输入一个点云输出一个向量
调节“速度的力度”——离得远时大步走,近了就小步走,所以我们不再是1/T 而是d_\phi/T