
Games101作业2
一、任务
需要自己填写rasterize_triangle(const Triangle& t)函数
该函数的内部工作流程如下:
- 创建三角形的2维bounding box。
- 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中心的屏幕空间坐标来检查中心点是否在三角形内。
- 如果在内部,则将其位置处的插值深度值 (interpolated depth value) 与深度缓冲区 (depth buffer) 中的相应值进行比较。
- 如果当前点更靠近相机,请设置像素颜色并更新深度缓冲区 (depth buffer)
你需要修改的函数如下:
rasterize_triangle(): 执行三角形栅格化算法static bool insideTriangle(): 测试点是否在三角形内。你可以修改此函数的定义,这意味着,你可以按照自己的方式更新返回类型或函数参数。
已知的是三角形三个顶点处的深度值,每一个三角形的颜色都是一样的。那么需要用插值的方法获得深度值。
二、作业
2.0 完成其他函数的编写
首先需要完成main.cpp中的get_projection_matrix()函数的编写,直接复制前一个作业的函数
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar)
{
// TODO: Copy-paste your implementation from the previous assignment.
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();
Eigen::Matrix4f Mperspective;
Mperspective << zNear, 0, 0, 0,
0, zNear, 0, 0,
0, 0, zNear + zFar, -zNear * zFar,
0, 0, 1, 0;
float half_height = std::tan(eye_fov / 2) * -zNear;
float half_width = half_height * aspect_ratio;
Eigen::Matrix4f Morth;
Morth << 1 / half_width, 0, 0, 0,
0, 1 / half_height, 0, 0,
0, 0, 2 / (zNear - zFar), (zFar - zNear) / (zNear - zFar),
0, 0, 0, 1;
projection = Morth * Mperspective;
return projection;
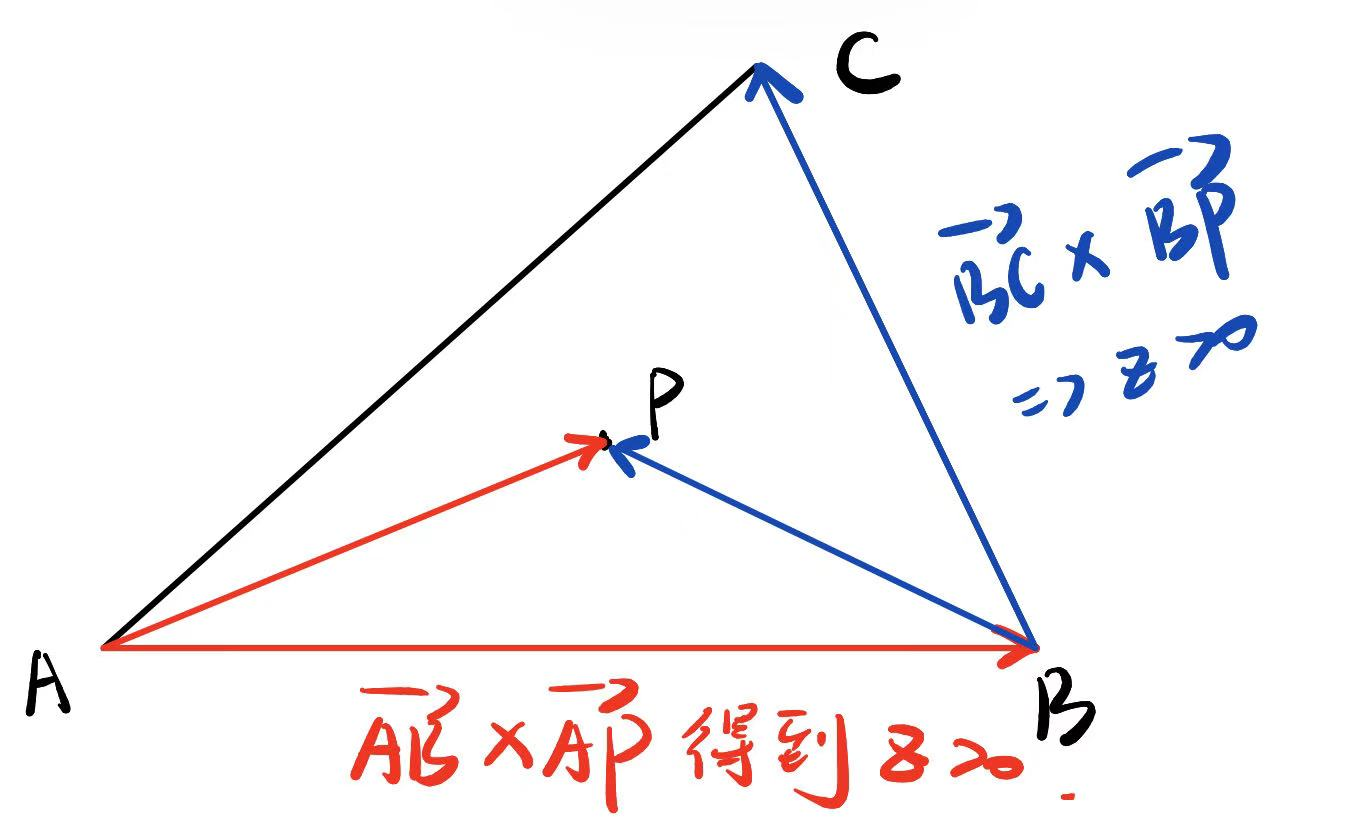
}然后完成判断点(x,y)是否在三角形内的函数insideTriangle(),主要采用的是对于每一条边都进行叉乘,判断是否都是竖直向上的(右手定则)
static bool insideTriangle(float x, float y, const Vector3f* _v) // float
{
// TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]
Vector3f A = _v[0], B = _v[1], C = _v[2];
Vector3f P(x, y, 0);
Vector3f AB = B - A, BC = C - B, CA = A - C;
Vector3f AP = P - A, BP = P - B, CP = P - C;
return AB.cross(AP).z() > 0 && BC.cross(BP).z() > 0 && CA.cross(CP).z() > 0;
// cross表示的是叉乘,z()表示的是z坐标
}至此其他函数全部结束,主要完成rasterize_triangle()函数的编写
2.1 不带MSAA的光栅化
给出一个三角形的三个点的坐标信息,则需要对于光栅化中每一个像素进行判断,对于(x,y)像素应该是什么颜色的\mathbf{color}。首先为了节省不必要的浪费,需要求bounding box,在这里面进行判断即可,求出minx,maxx,miny,maxy四个变量。
接着对于每一个像素进行遍历,因为这个函数传入的是当前的三角形,而深度测试的变量则是一个类似于全局变量的东西,所以需要对于当前三角形bounding box中每一个像素进行判断:
- 像素
(x,y)是否在三角形内?不在直接不进行任何考虑 - 在三角形内,则需要获取该像素的深度
z(通过重心坐标插值,作业中已经提示) - 如果“全局变量”
depth_buf对于这个点(x,y)存的值要比z还要大,说明需要更新,此时的三角形更接近(需要覆盖原来的),所以保存现在的值,即这个三角形的颜色
那么代码就很容易写出来了:
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4(); // v表示三角形的三个顶点
int minx = std::min(v[0].x(), std::min(v[1].x(), v[2].x()));
int maxx = std::max(v[0].x(), std::max(v[1].x(), v[2].x()));
int miny = std::min(v[0].y(), std::min(v[1].y(), v[2].y()));
int maxy = std::max(v[0].y(), std::max(v[1].y(), v[2].y()));
// Boundary Box
for (int x = floor(minx); x <= ceil(maxx); x++) {
for (int y = floor(miny); y <= ceil(maxy); y++) {
if (insideTriangle(x, y, t.v)) {
auto [alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w()); // v[i].w表示顶点i的齐次坐标的w分量
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
int index = get_index(x, y);
if (depth_buf[index] > z_interpolated) {
depth_buf[index] = z_interpolated;
Eigen::Vector3f color = t.getColor();
set_pixel(Eigen::Vector3f(x, y, 0), color);
} // 需要进行覆盖,此时的三角形更近
}
}
}
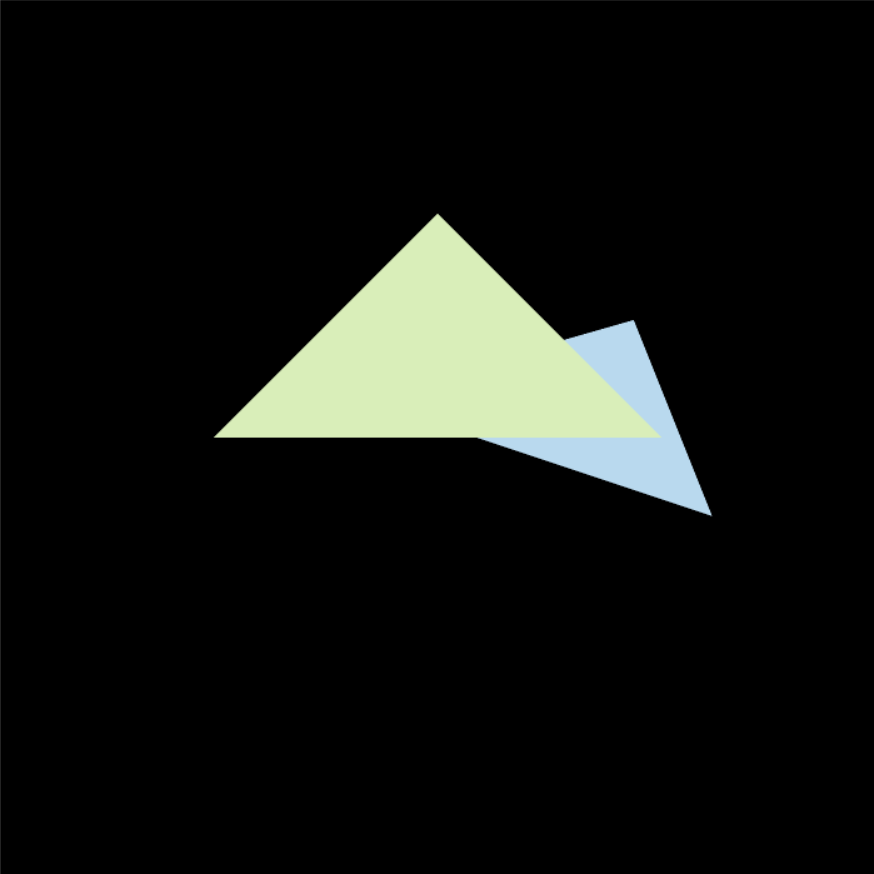
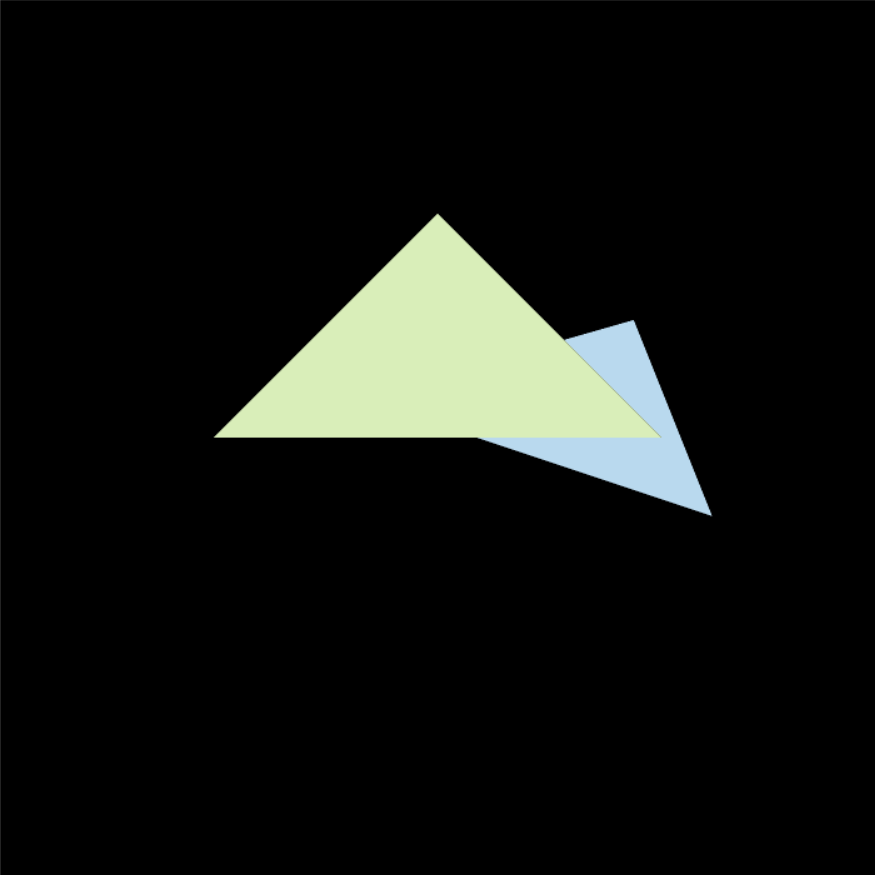
}结果如下:
我们放大来看走样的细节:
可以看出边缘处有很严重的“锯齿状”,所以需要使用MSAA算法进行优化。
2.2 MSAA算法初始版(带有黑边)
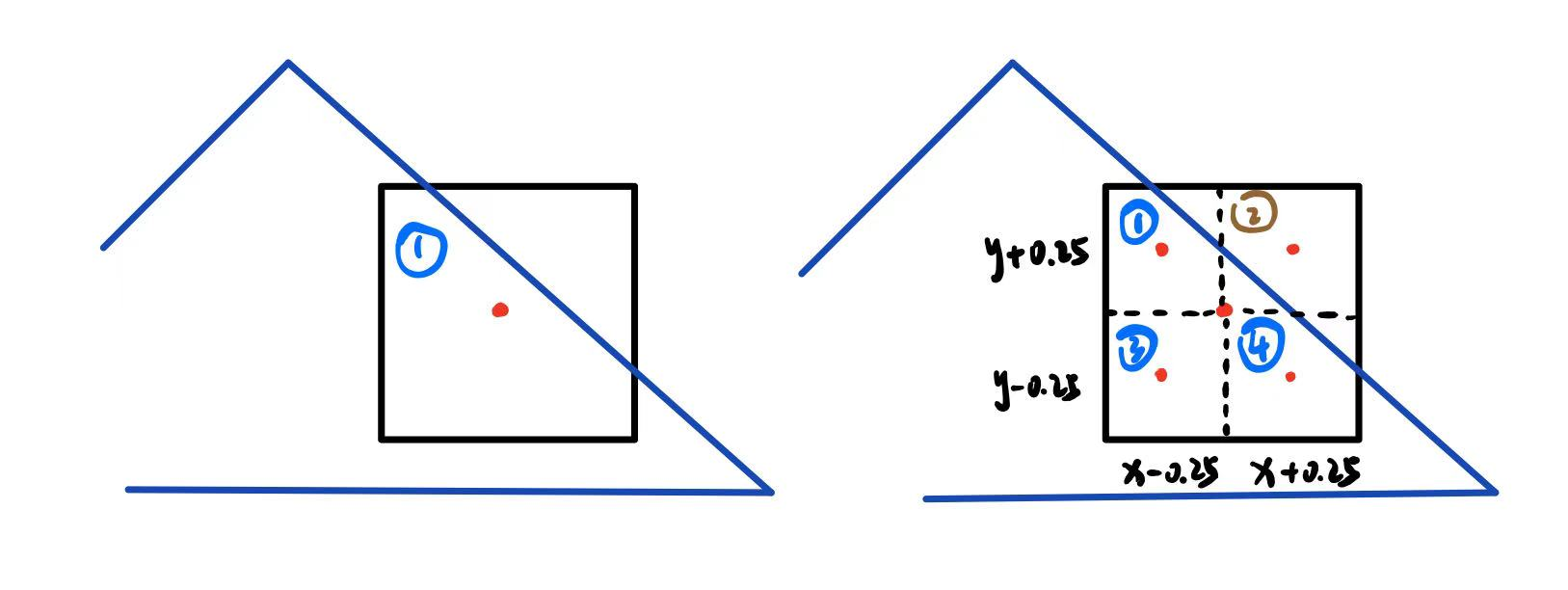
MSAA算法主要是重新进行采样,对于一个像素点不仅仅只看其是否在三角形内(左图),而是对于它附近的四个进行查看并做贡献(右图)。
- 我们先看左图,在之前的算法中,如果一个像素的中心在三角形内,那么这个像素就是该三角形的颜色,这显然是不对的。如图中在边缘的情况下,明明有很大一部分不在三角形内,却认为这一部分就是蓝色。当然,从贡献的角度上来看,它应该是
\frac{\text{在三角形内面积}}{该像素总面积},那么我们应该如何做呢? - 我们再来看右图,这里选择四倍的采样,对于一个点的附近四个点进行选择,判断这四个点是否在该三角形内并计数,按照计数做出贡献。所以图中的这个点应该做出
\frac{3}{4}蓝色的贡献,也就是这个像素应该是该三角形颜色的\frac{1}{4}
那么就很好修改了,只需要考虑附近的四个点,写一层循环遍历一下附近的四个点,但是由于我们是0-index,所以我们对于当前像素(x,y)考虑的是(x+0.25,y+0.25)、(x+0.75,y+0.25)、(x+0.25,y+0.75)、(x+0.75,y+0.75)。
如果有cnt个点在三角形内,那么就贡献\frac{cnt}{4}的颜色,这个像素点的颜色就是如此。
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4(); // v表示三角形的三个顶点
int minx = std::min(v[0].x(), std::min(v[1].x(), v[2].x()));
int maxx = std::max(v[0].x(), std::max(v[1].x(), v[2].x()));
int miny = std::min(v[0].y(), std::min(v[1].y(), v[2].y()));
int maxy = std::max(v[0].y(), std::max(v[1].y(), v[2].y()));
// Boundary Box
float dx[4] = {0.25, 0.25, 0.75, 0.75}, dy[4] = {0.25, 0.75, 0.25, 0.75};
for (int x = floor(minx); x <= ceil(maxx); x++) {
for (int y = floor(miny); y <= ceil(maxy); y++) {
int cnt = 0;
float pixelR = 0, pixelG = 0, pixelB = 0;
for (int i = 0; i < 4; i++) {
float nx = x + dx[i], ny = y + dy[i];
// debug2(nx, ny);
if (insideTriangle(nx, ny, t.v)) {
cnt++;
}
}
if (cnt > 0) { // 有点在三角形中
auto [alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w()); // v[i].w表示顶点i的齐次坐标的w分量
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
int index = get_index(x, y);
if (depth_buf[index] > z_interpolated) {
depth_buf[index] = z_interpolated;
Eigen::Vector3f color = t.getColor() / 4.0 * cnt;
set_pixel(Eigen::Vector3f(x, y, 0), color);
}
}
}
}
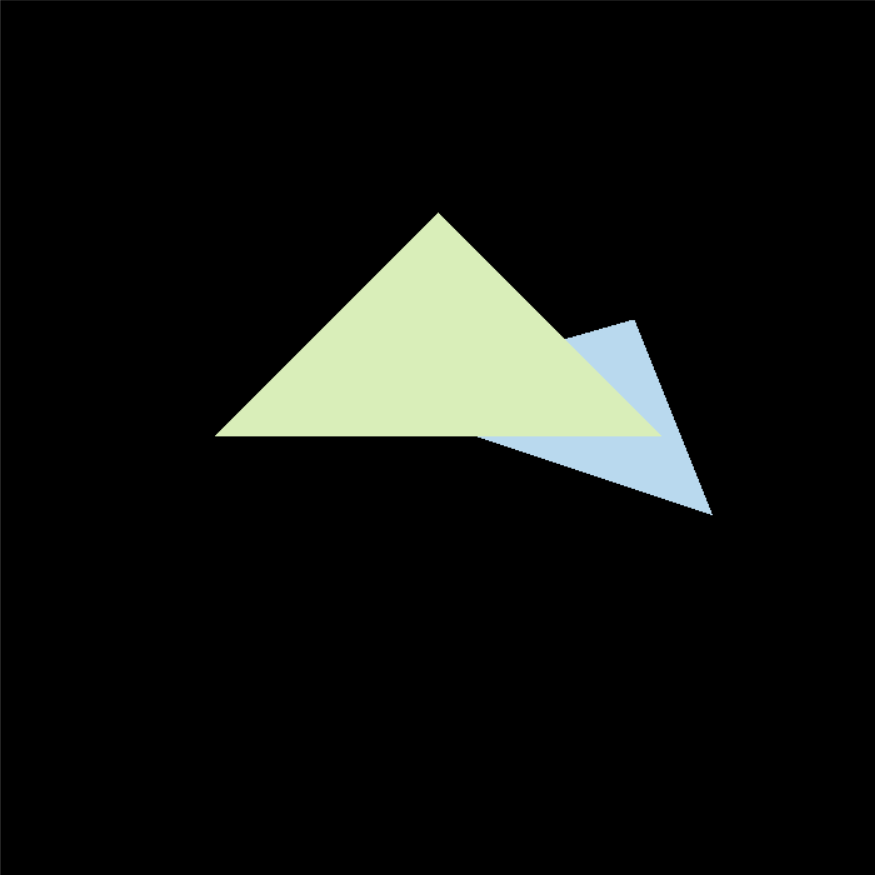
}那么这个时候来看效果
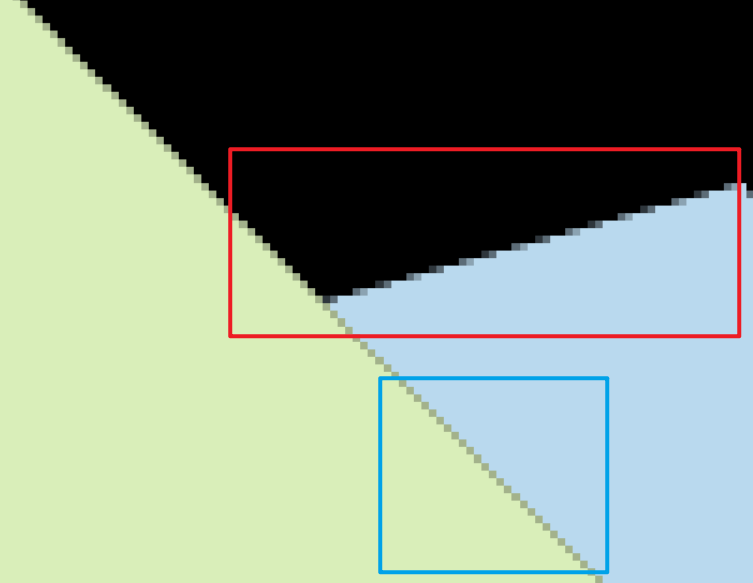
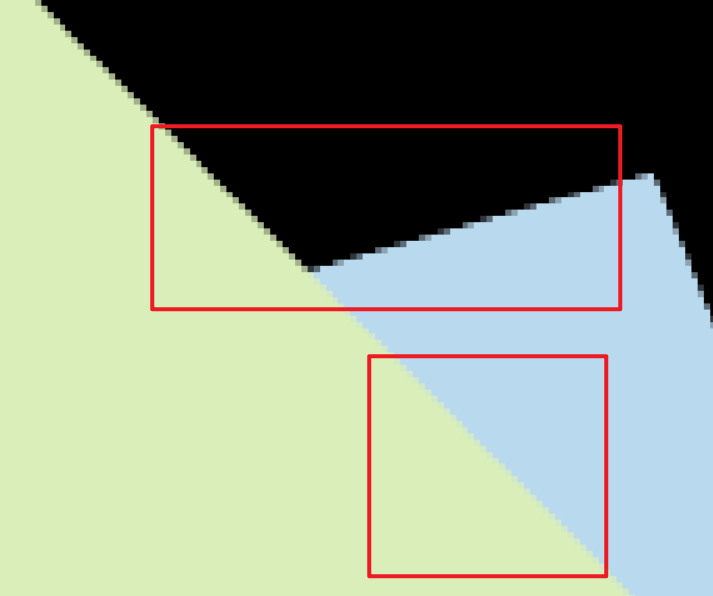
从红色方框上来看可以看出我们在边缘地方已经拥有了“渐变”的功能,这让我们在总体上完成了MSAA算法,在边缘处不会有那么明显的走样。
2.3 黑边问题分析
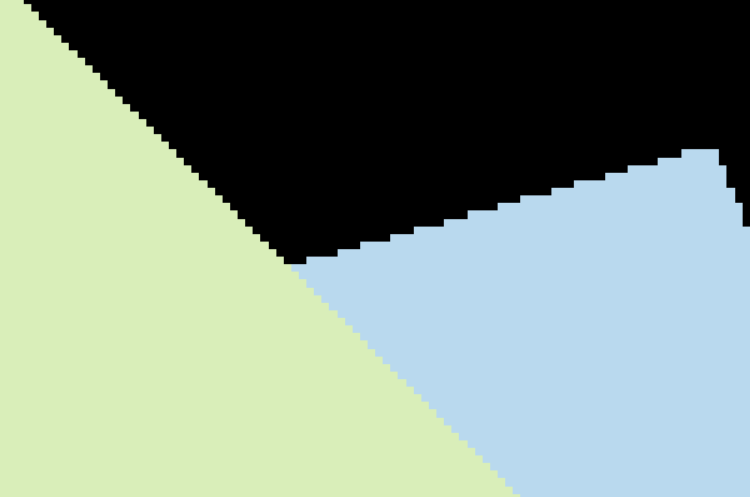
在蓝色方框处可以看出,在这一部分拥有了黑边,这是因为我在考虑绿色的三角形的时候,对于点(x,y)只会考虑在它的三角形内对于depth_buf[(x,y)]做出的贡献,而如果此时另外不在它这个三角形的点,而在另外一个三角形呢?在这个算法就会进行抛弃。
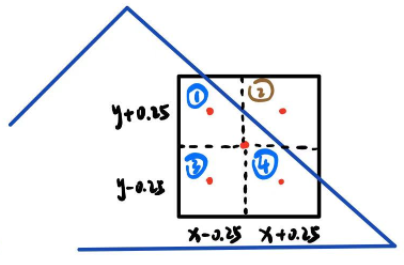
也就是说,我们再来看这个图,1、3、4都在蓝色三角形内,而2在棕色三角形内(假设),那么这个像素点(x,y)的颜色应该由它们两个共同做出贡献,而不是只看(x,y)在哪个三角形内而已。
2.4 MSAA算法(完整版)
那么我们需要一个更多的depth_buf来存储每个像素的四个采样点的深度,最后遍历完所有的三角形之后对于每一个像素统一进行填充颜色(但是在这里写在了每一个三角形后)
我设置了一个结构体:
struct Pixel4x {
Eigen::Vector3f color[4];
float depth[4];
};保存每个像素有四个采样点的颜色以及对应深度,而对于每个点(x,y)的采样点(nx,ny)进行2.1中的算法,填充到pixels中(而不是depth_buf)中。最后对于每一个像素进行颜色的加和,当然,每一个点的颜色贡献是\frac{1}{4}.
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4(); // v表示三角形的三个顶点
int minx = std::min(v[0].x(), std::min(v[1].x(), v[2].x()));
int maxx = std::max(v[0].x(), std::max(v[1].x(), v[2].x()));
int miny = std::min(v[0].y(), std::min(v[1].y(), v[2].y()));
int maxy = std::max(v[0].y(), std::max(v[1].y(), v[2].y()));
// Boundary Box
float dx[4] = {0.25, 0.25, 0.75, 0.75}, dy[4] = {0.25, 0.75, 0.25, 0.75};
for (int x = floor(minx); x <= ceil(maxx); x++) {
for (int y = floor(miny); y <= ceil(maxy); y++) {
for (int i = 0; i < 4; i++) {
float nx = x + dx[i], ny = y + dy[i];
// debug2(nx, ny);
if (insideTriangle(nx, ny, t.v)) {
auto [alpha, beta, gamma] = computeBarycentric2D(nx, ny, t.v); // 计算插值系数
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w()); // v[i].w表示顶点i的齐次坐标的w分量
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal; // 当前深度
int index = get_index(x, y);
if (pixels[index].depth[i] > z_interpolated) {
pixels[index].depth[i] = z_interpolated;
Eigen::Vector3f color = t.getColor();
pixels[index].color[i] = color;
}
}
}
}
}
for (int x = floor(minx); x <= ceil(maxx); x++) {
for (int y = floor(miny); y <= ceil(maxy); y++) {
int index = get_index(x, y);
Eigen::Vector3f color = Eigen::Vector3f(0, 0, 0);
for (int i = 0; i < 4; i++) {
color += pixels[index].color[i];
}
color /= 4.0;
set_pixel(Eigen::Vector3f(x, y, 0), color);
}
} // 写在了此处,应该是所有三角形遍历完之后进行,我认为都可以
}结果如下:
可以看出我们在边缘和黑边问题都进行了改善,减少了走样的问题以及两个三角形覆盖边缘处的黑边。缺点当然就是我多用了空间和时间,可以明显感觉到它变慢了。