使用CloudCompare进行裁剪和补全点云
写在前面
进行导入import等这是很常见的了,注意这里有中文显示,在Display下方的Language,但是是部分中文。
本次只展示如何裁剪点云和补全点云
一、裁剪点云
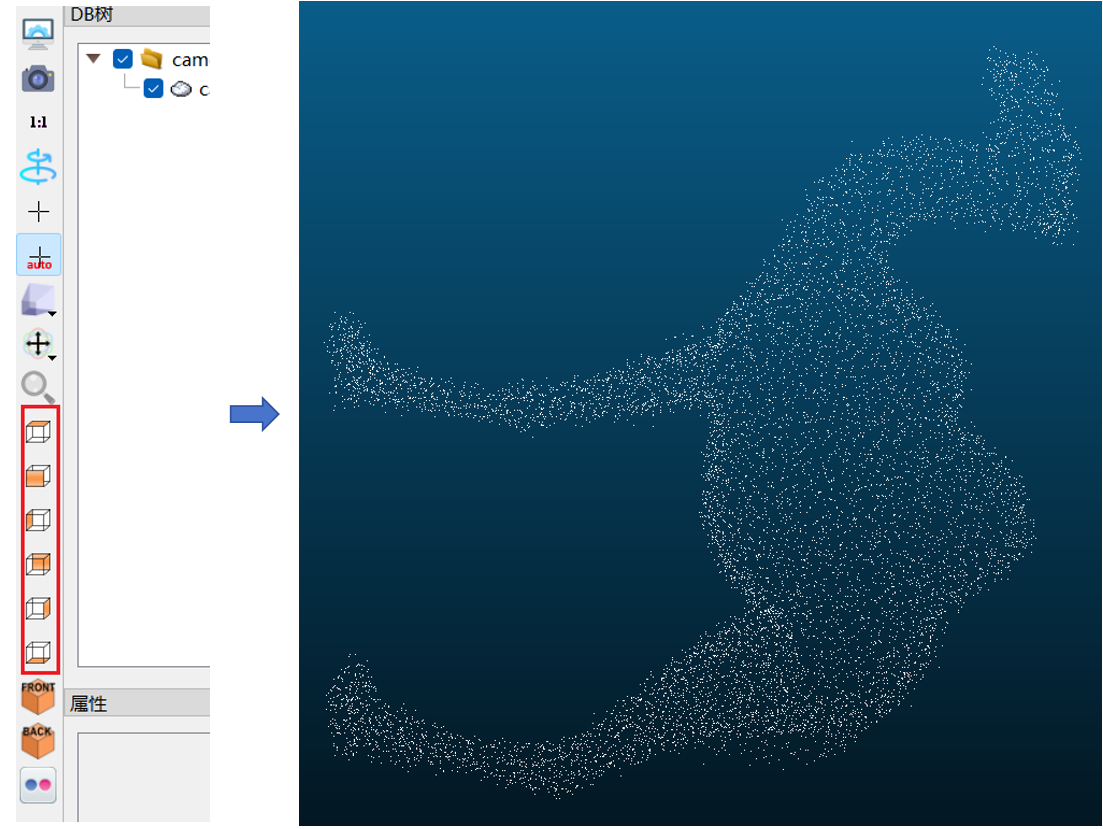
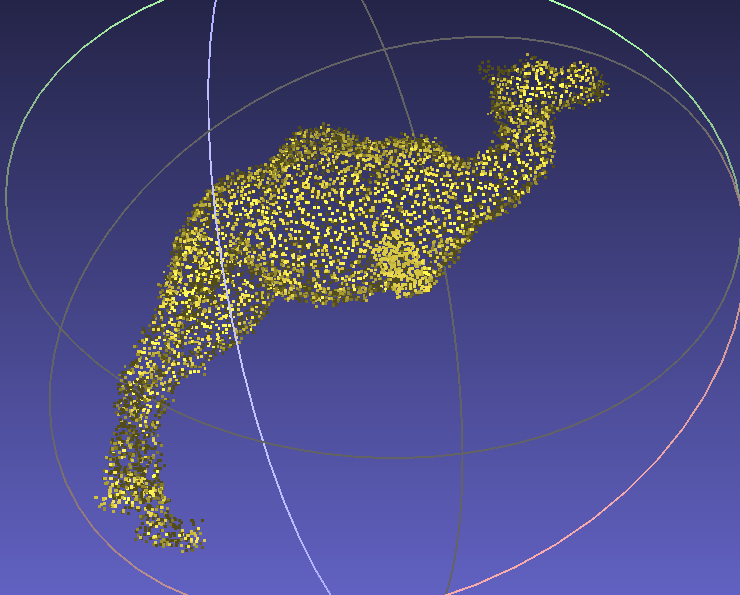
我这里需要对点云的一部分手动进行删除,这里以骆驼举例(camel.xyz),首先导入进去就可以进行拖动查看等,如下:
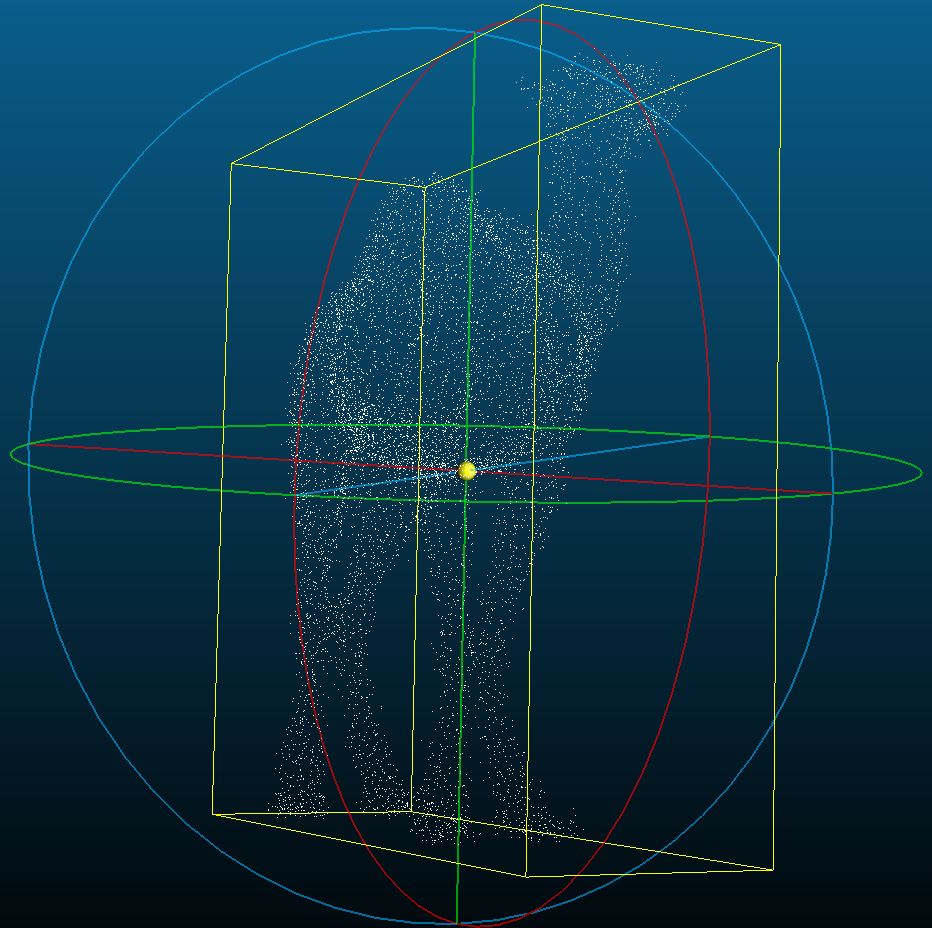
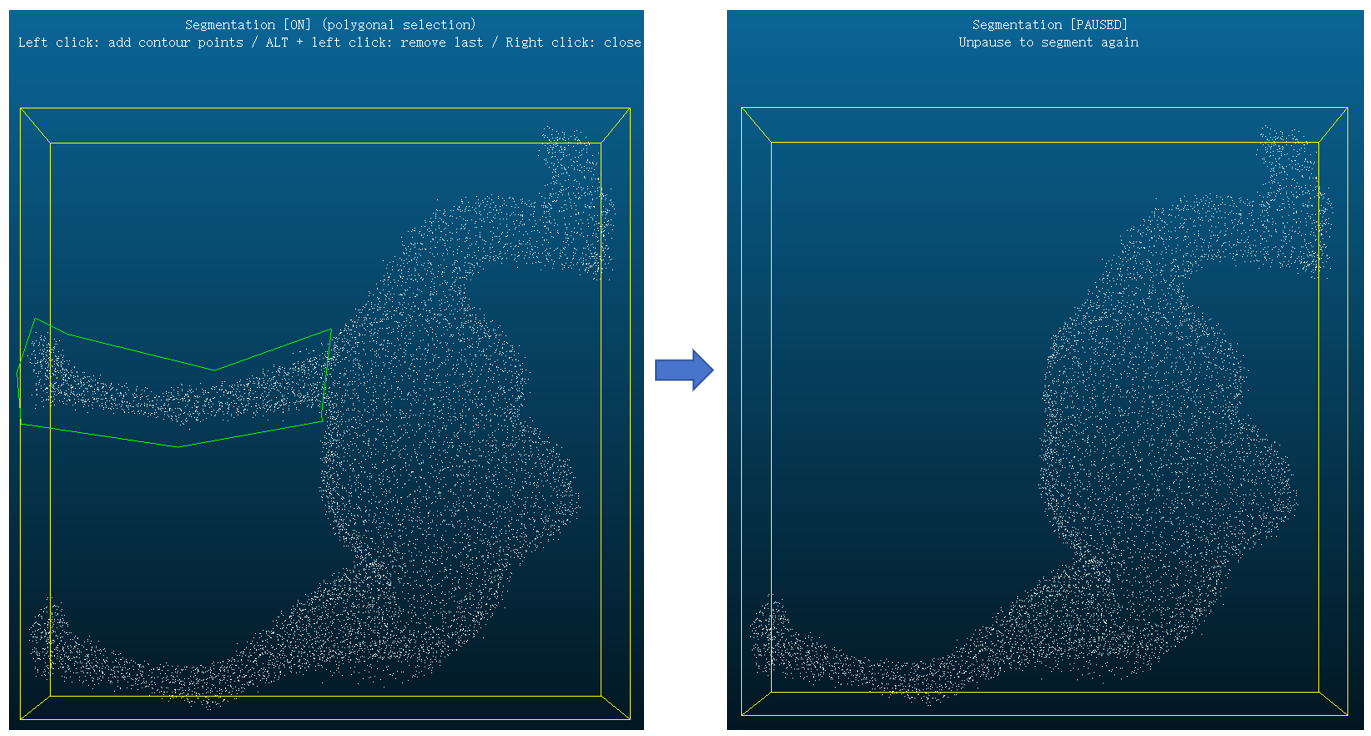
例如我现在想把腿部进行删除,它的逻辑是当前平面内框选的都删除,那么我们把它放平,正好可以选取要删除的腿部最好,在左边有六个包围盒面的视角,
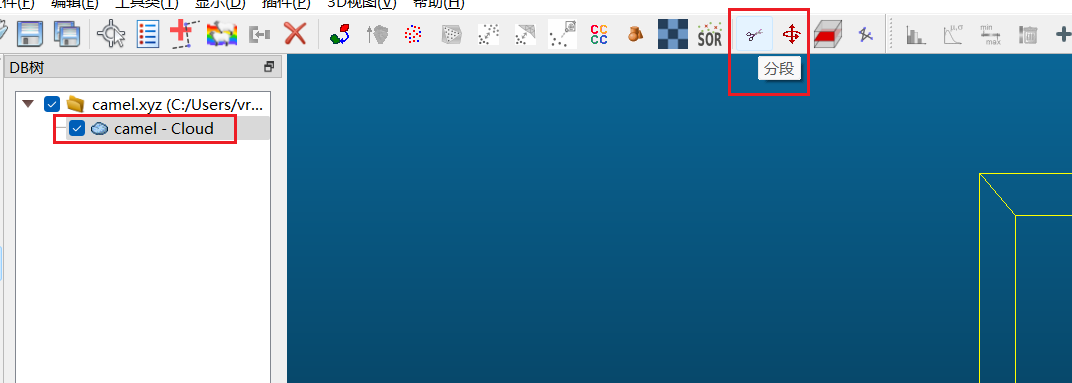
然后点击菜单上方的剪刀✂️(segment)操作
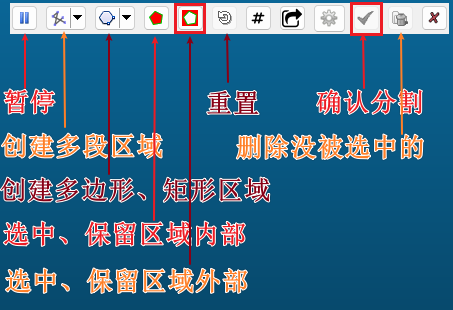
然后就可以进行框选:
- 不需要拖拽,左键点即可
- 右键点击即取消/停止
切割完之后原来的文件也会在左侧保留,左侧一共会有两个点云了,可以选择其中一个进行展示或者删除原来的,现在我们放在meshlab中进行查看,
我们可以点击保存(save)对应文件即可。确实进行删除了,结果如下。
二、补全点云
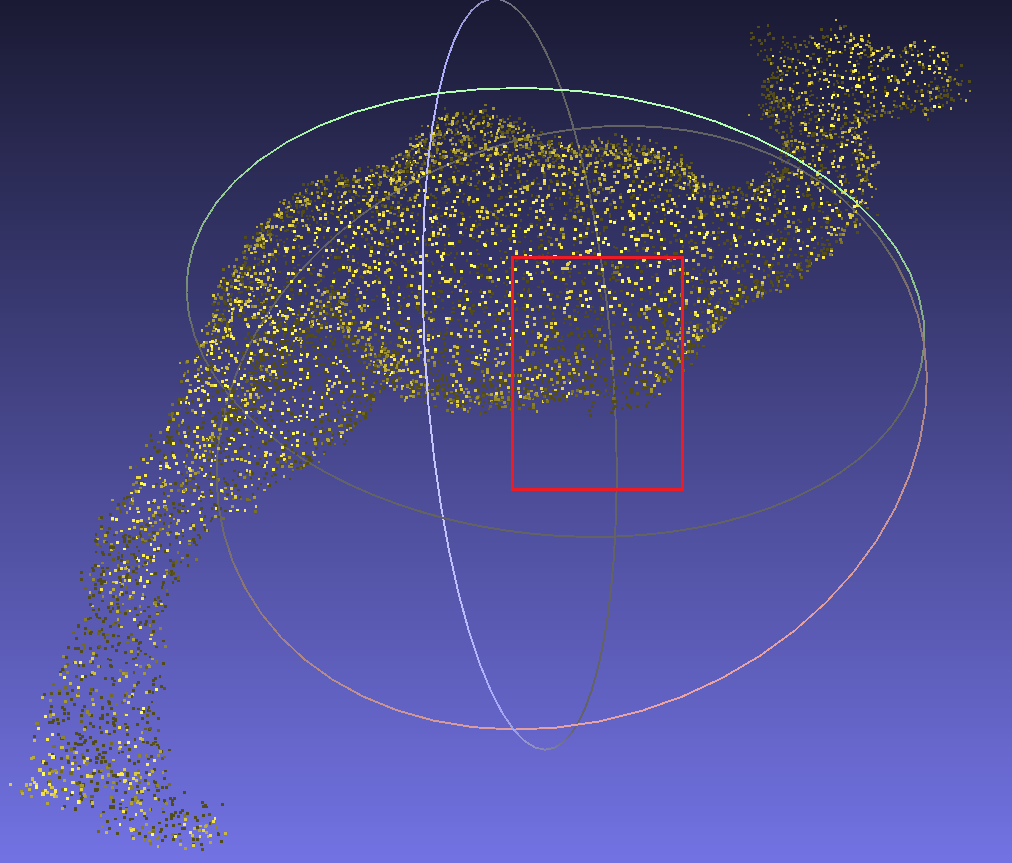
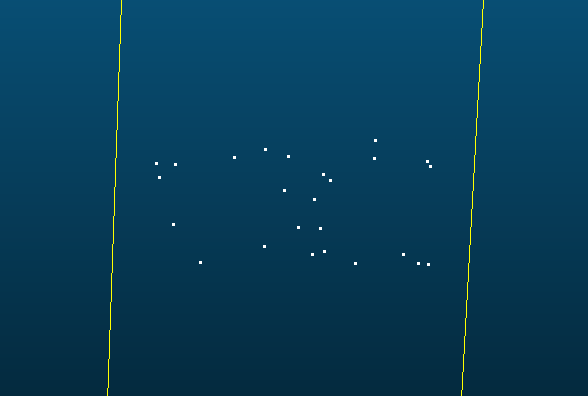
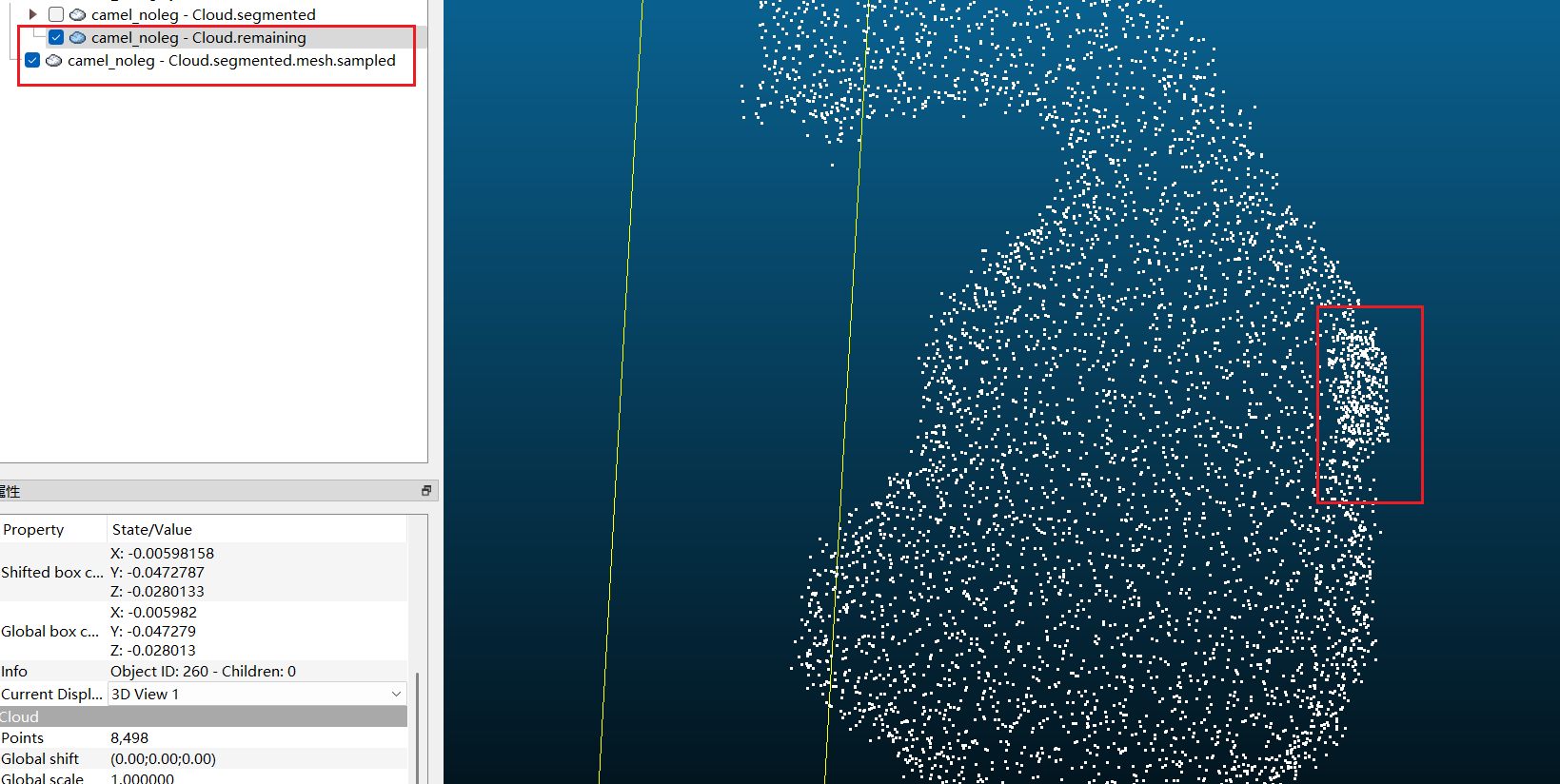
现在可以通过构建Mesh等操作来完成点云的补全,首先导入刚刚的点云,并且我需要框选出很薄的那一部分(我觉得这个很难,我更偏向于手动补充)
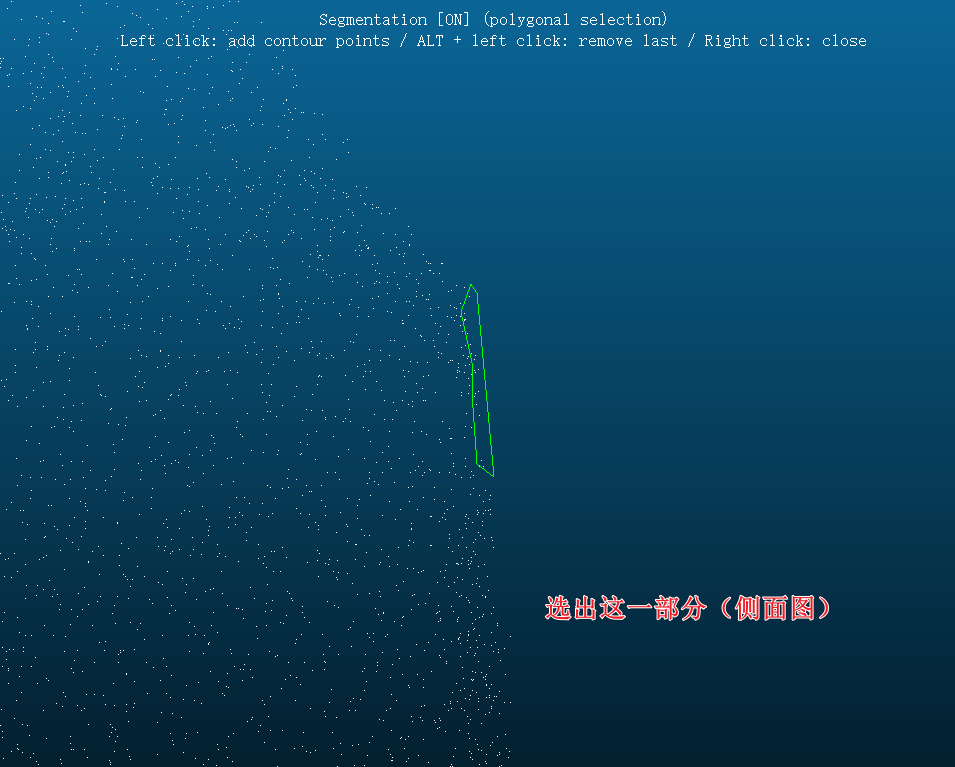
然后点击保留这一部分,也就是从左往右数的第四个键,得到如下的结果
其实到这里我就希望可以进行投影之后的手动补全了,也就是点击鼠标左键表示增加一个点云,但是好像并未有这个效果,现在我们通过构建Mesh进行。
我们点击“编辑-网格模型-德劳内2.5D三角网格”
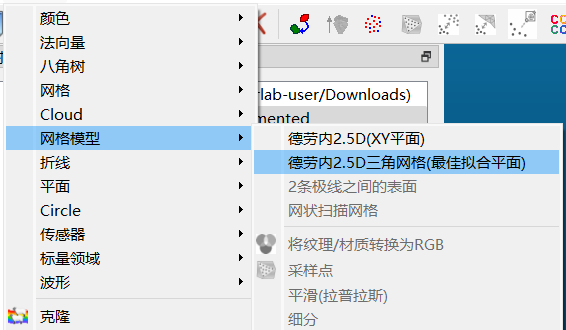
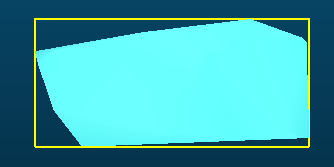
现在就会得到这样的平面:
然后我们首先点击mesh,然后在“网格模型”中点击“采样点”,设置参数就可以得到这个区域的采样点了
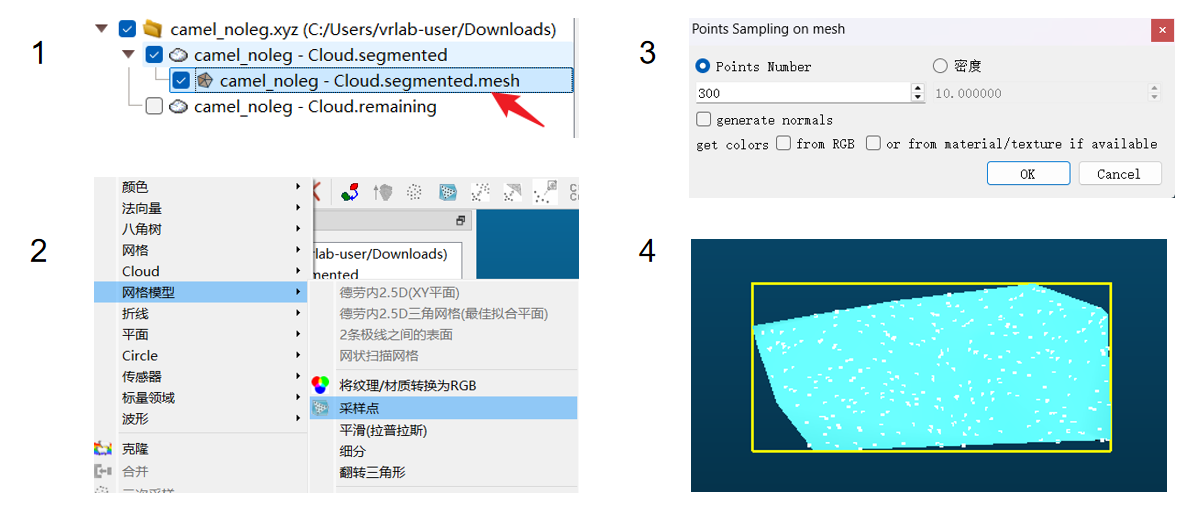
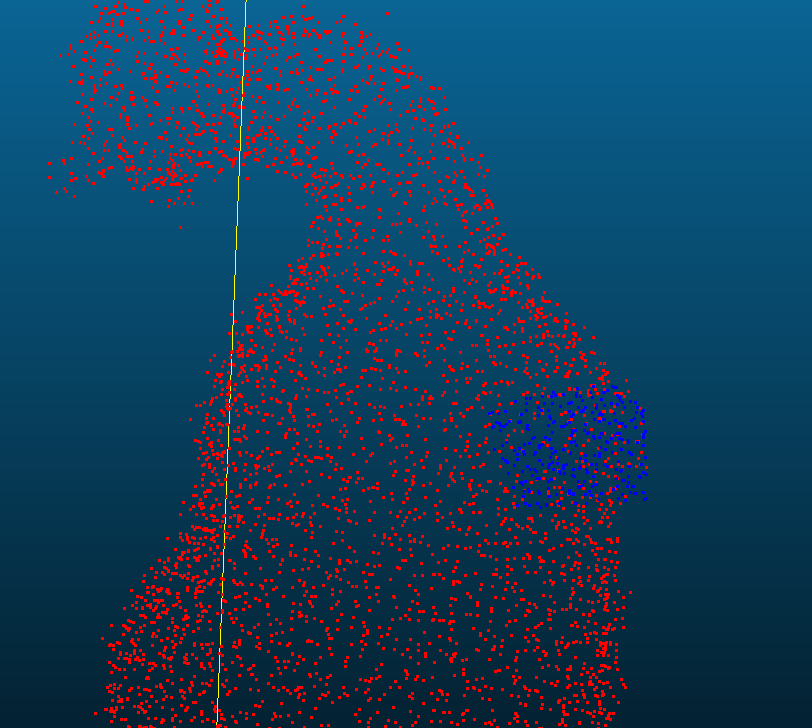
我们可以看到它并不完全是2D的投影,
我们点击两个点云文件,可以看到表现其实比较差的,很突兀,当然这里只是仅供参考。
接下来就是让两个点云进行合并,点击“编辑(E)-合并(Merge)”,记得不仅仅是选取✅,而是要Ctrl➕文件按住。现在我们可以看到合并成一个点云文件了
我们接下来导出,但是这里需要注意的是如上图所示我们已经有了两个颜色,那么不会只有三维信息(这里两个颜色并不是RGB而是为了分类两个部分),要想只得到三维坐标,我们需要把其他的进行清除
- 清除法向量(
Edit → Normals → Clear) - 删除标量场(
Edit → Scalar fields → Delete all)这里是标量场的问题,第四维只有0和1 - 清除颜色(
Edit → Colors → Clear)
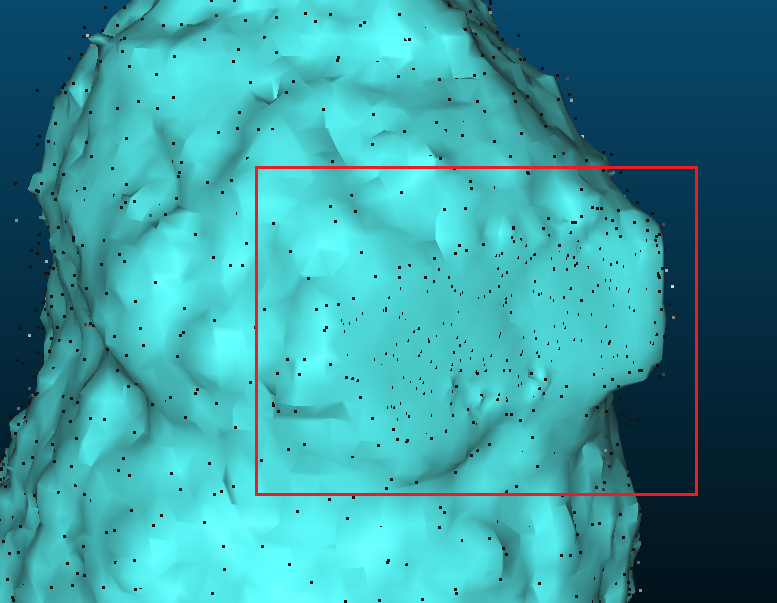
最后我们放在meshlab上结果如下:
从泊松重建的表面来看表现还是挺不错的: